docs.unavlab.com
Главная ❯ Гидроакустические навигационные и трекинговые системы ❯ Zima USBL: Рукводство пользователя
ℹ Рекомендации для печати/сохранения в PDF
- Нажмите Ctrl+P (macOS: Cmd+P)
- В настройках принтера выберите «Сохранить как PDF» (Microsoft Print to PDF)
- В поле «Страницы» укажите диапазон, исключая первую и последнюю страницу
- Отключите верхние и нижние колонтитулы (заголовки/URL/page numbers)
- В Chrome/Edge: в доп. настройках → «Поля» → Нет | в Firefox: «Поля и колонтитулы» → Нет
- Нажмите Печать и укажите куда сохранить PDF
| www.unavlab.com support@unavlab.com |
Zima USBL - гидроакустическая навигационная система Руководство пользователя |
Zima USBL
Руководство пользователя
Содержание
- 1. Введение
- 2. Состав системы
- 3. Пультовое ПО ZHost
- 4. Эффективное применение навигационной системы Zima USBL
- 5. Возможные неисправности, их диагностика и устранение
- 6. Обязательства и отказ от ответственности
1. Введение
Подводная акустическая навигационная система Zima предназначена определения в реальном времени горизонтального угла и дистанции до подводных объектов, оснащенных гидроакустическими маяками-ответчиками Zima-R. Маяки-ответчики (далее маяки) могут устанавливаться на телеуправляемые подводные аппараты (ТНПА), обитаемые подводные аппараты (ОПА), автономные необитаемые подводные аппараты (АНПА) а также на дайверов и технических водолазов (в случае использования автономной версии маяка).
Навигационная система Zima является ультракороткобазисной навигационной системой (УКБ, англ. USBL), принцип работы которой основан на применении фазированной антенной решетки для определения горизонтального угла прихода сигнала и определения дистанции до маяка методом “запрос-ответ”. Отличительной особенностью данной системы является т.н. двусторонняя навигация, запатентованное решение, которое позволяет взаимно определять дистанцию как на базовой станции, так и на маяке, а также передавать на маяк азимутальный угол на базовую станцию. Система также позволяет передавать на маяки сигналы телеуправления и получать от маяков телеметрические данные.
2. Состав системы
2.1. Zima-B: Гидроакустическая станция пеленгования
2.1.1. Общие сведения
Гидроакустическая станция пеленгования Zima-B (далее базовая станция) предназначена для передачи на маяки управляющих акустических сигналов, определения времени распространения сигнала до маяков, определения горизонтального угла прихода ответных сигналов маяков, передачи команд телеуправления и получения телеметрической информации от маяков посредством специализированных гидроакустических сигналов.
 |
|---|
| Рисунок 1 - Базовая станция Zima-B |
| внешний вид |
Базовая станция выполняется в виде необслуживаемого моноблока на кабеле, залитого в высокопрочный полиуретановый компаунд. Станция имеет фазированную антенную решетку, передающую антенну, встроенный датчик глубины/температуры. В качестве дополнительной опции базовая станция комплектуется системой определения курса и положения. В общем случае базовая станция монтируется на жесткой вертикальной штанге с учетом направленности антенны - определяемые углы прихода передаются в системе координат антенны.
 |
|---|
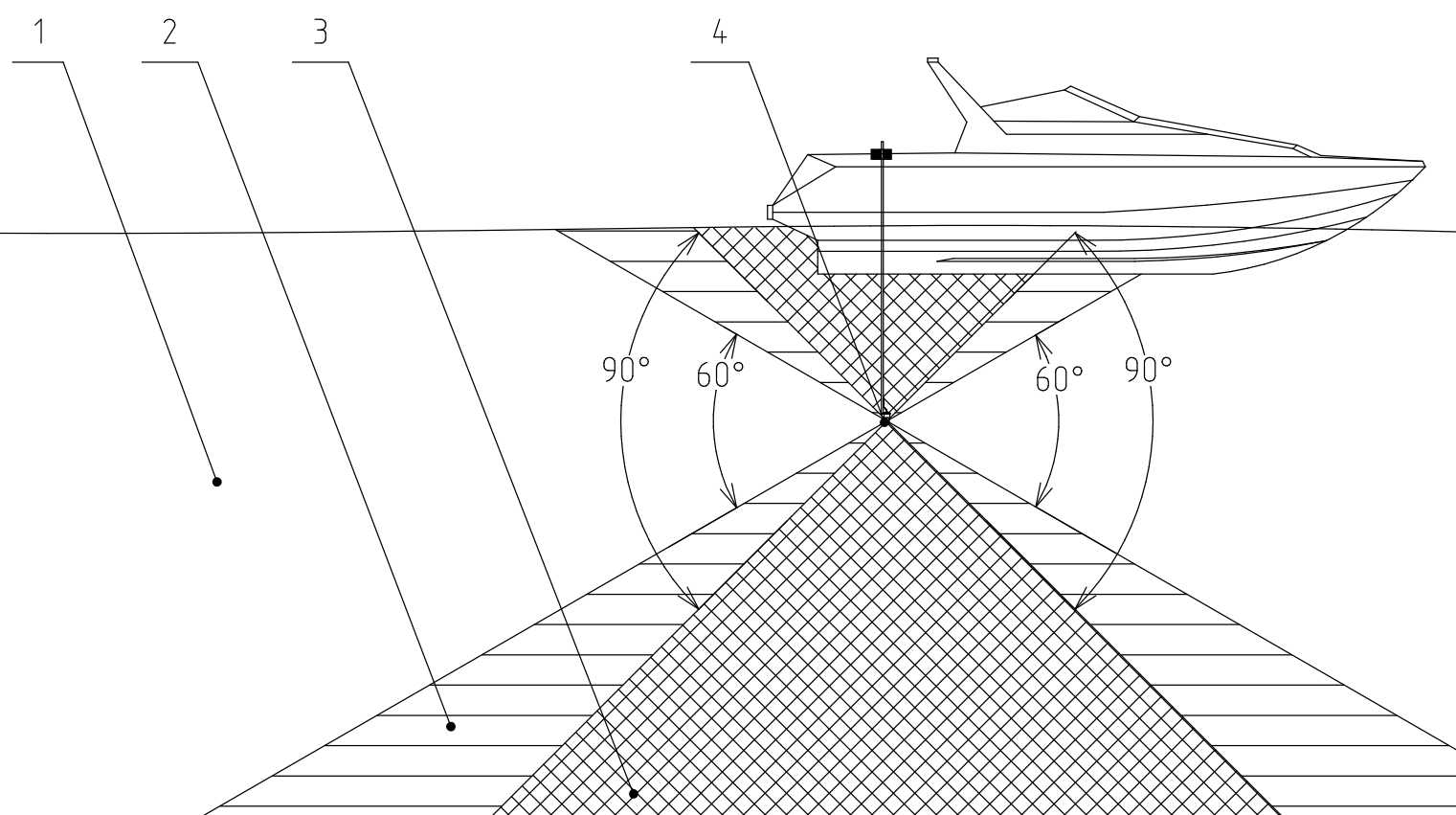
| Рисунок 2 - Схема установки антенны Zima-B |
| 1-штанга, 2-судно, 3-поверхность воды, 4-кабель, 5-антенна Zima-B, 6-нулевое направление антенны |
На рисунке 3 представлен габаритный чертеж базовой станции Zima-B. Базовая станция имеет ввод кабеля энергетического и информационного сопряжения и отверстие датчика давления/температуры. Структурно базовая станция разделена на следующие части: кабельный ввод (в верхней части станции) и крепежный паз для фиксации станции при помощи хомута. Ниже располагается цилиндрическая поверхность передающего пьезоэлемента, под которой находится приемная фазированная антенная решетка. Поверхности передающего элемента и приемной решетки при установке перекрывать или экранировать не допускается. Для правильной работы станции требуется прямая видимость между рабочими поверхностями станции и антенной маяка-ответчика.
 |
|---|
| Рисунок 3 - Zima-B |
| габаритный чертеж |
В стандартной конфигурации Zima-B поставляется с преобразователем интерфейса UART<->RS-422 и кабелем длиной 10 метров, который подключается к блоку питания и коммутации Bat&Link Box. Таким образом, посредством блока коммутации станция подключается к пультовому ПК через интерфейс USB (последовательный порт).
2.1.2. Технические характеристики
| ПАРАМЕТР | ЗНАЧЕНИЕ |
|---|---|
| ГАБАРИТЫ (Ф х h) | 64 x 128 мм |
| ВЕС (сухой)1 | 0.44 кг |
| МАКСИМАЛЬНАЯ ГЛУБИНА | 40 м |
| НОМИНАЛЬНАЯ ПОГРЕШНОСТЬ ПО ГЛУБИНЕ | 0.1 м |
| МАКСИМАЛЬНАЯ ДАЛЬНОСТЬ СВЯЗИ | 3000 м |
| НОМИНАЛЬНАЯ ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОГО УГЛА ПРИХОДА СИНГНАЛА2 | 1° |
| МАКСИМАЛЬНЫЙ КОМПЕНСИРУЕМЫЙ ВСТРОЕННЫМ ИНКЛИНОМЕТРОМ НАКЛОН ПРИБОРА ОТНОСИТЕЛЬНО ВЕРТИКАЛИ (КРЕН/ДИФФЕРЕНТ) | +/- 30° |
| РАБОЧИЙ КОНУС (ОТНОСИТЕЛЬНО ГОРИЗОНТАЛИ)2 | +/-30° |
| ПОЛОСА ЧАСТОТ | 6 .. 18 кГц |
| ТОЧНОСТЬ ВСТРОЕННОГО ДАТЧИКА ТЕМПЕРАТУРЫ | 0.1°С |
| BIT ERROR RATE | 10-6 |
| SNR2 | -3 дБ |
| МАКСИМАЛЬНАЯ ОТНОСИТЕЛЬНАЯ СКОРОСТЬ | +/- 2 м/с |
| ВРЕМЯ СТАРТА | 100 мсек |
| ДИАПАЗОН РАБОЧИХ ТЕМПЕРАТУР | -5 .. 50 °C |
| ВРЕМЯ АВТОНОМНОЙ РАБОТЫ3 ПРИ ПИТАНИИ ОТ BAT&LINK BOX | 8 ч |
| ИНТЕРФЕЙС СОПРЯЖЕНИЯ | USB (COM) 9600 бит/с |
| ПРОТОКОЛ СОПРЯЖЕНИЯ | NMEA 0183 PZMA |
| ДЛИНА КАБЕЛЯ4 | 10 м |
| СХЕМА РАЗДЕЛЕНИЯ АБОНЕНТОВ (КОМАНД/АБОНЕНТОВ) | 32/23 |
1 Без учета веса преобразователя и кабеля
2 Значение получено без учета эффекта многолучевого распространения в лабораторном статическом эксперименте
3 При режиме работы станции 1 запрос в 3 секунды
4 С учетом преобразователя интерфейса и удлиняющего кабеля до прибора Bat&Link Box. Опционально возможно увеличение до 20 метров
2.1.3 Хранение и обслуживание
К базовой станции не предъявляется особых требований по хранению и обслуживанию, за исключением следующих:
- При использовании в соленой и/или сильно загрязненной воде необходимо проводить опреснение (отстой и промывку в пресной воде)
- Не допускается применение каких-либо органических растворителей, сильных кислот, щелочей и других агрессивных веществ
- При необходимости возможна промывка в бытовых мыльных растворах, избегая попадания жидкости на разъем
- Не допускается воздействия ударных или значительных статических нагрузок
- Не допускается сильное (с радиусом менее 5 см) перегибание кабеля
2.2. Zima-R: маяк-ответчик
2.2.1. Общие сведения
Маяк-ответчик выполняется в виде необслуживаемого моноблока на кабеле, залитого в высокопрочный полиуретановый компаунд. Внешний вид маяка-ответичка Zima-R показан на рисунке 4. Структурно маяк содержит кабельный ввод, крепежный паз, отверстие датчика давления и рабочую поверхность. Отверстие датчика давления и рабочие поверхности (цилиндр и торец цилиндра, противоположный кабельному вводу) перекрывать и экранировать не допускается. Для правильной работы акустической связи требуется прямая видимость между базовой станцией и маяком-ответчиком.
 |
|---|
| Рисунок 4 - Zima-R |
| внешний вид (автономное исполнение) |
2.2.2. Технические характеристики
| ПАРАМЕТР | ЗНАЧЕНИЕ |
|---|---|
| ГАБАРИТЫ (Ф х h) | 64 x 62 мм |
| ВЕС (сухой)1 | 0.3 кг |
| МАКСИМАЛЬНАЯ ГЛУБИНА | 300 м |
| НОМИНАЛЬНАЯ ПОГРЕШНОСТЬ ПО ГЛУБИНЕ | 0.1 м |
| МАКСИМАЛЬНАЯ ДАЛЬНОСТЬ СВЯЗИ | 3000 м |
| ПОЛОСА ЧАСТОТ | 6 .. 18 кГц |
| ТОЧНОСТЬ ВСТРОЕННОГО ДАТЧИКА ТЕМПЕРАТУРЫ | 0.1°С |
| НАПРЯЖЕНИЕ ПИТАНИЯ | 5 .. 12 В |
| НАПРЯЖЕНИЕ ЛИНИЙ ДАННЫХ | 0 .. 3.3 В |
| BIT ERROR RATE | 10-6 |
| SNR2 | -3 дБ |
| МАКСИМАЛЬНАЯ ОТНОСИТЕЛЬНАЯ СКОРОСТЬ | +/- 2 м/с |
| ВРЕМЯ СТАРТА | 100 мсек |
| ДИАПАЗОН РАБОЧИХ ТЕМПЕРАТУР | -5 .. 50 °C |
| ИНТЕРФЕЙС СОПРЯЖЕНИЯ3 | UART 9600 бит/с |
| ПРОТОКОЛ СОПРЯЖЕНИЯ | NMEA 0183 PZMA |
| ДЛИНА КАБЕЛЯ3 | 0.5 м |
| СХЕМА РАЗДЕЛЕНИЯ АБОНЕНТОВ (КОМАНД/АБОНЕНТОВ) | 32/23 |
| НОМИНАЛЬНАЯ ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОГО УГЛА4 | 1˚ |
| НОМИНАЛЬНАЯ ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ4 | 0.3 м |
Дополнительные параметры батарейной канистры5
| ПАРАМЕТР | ЗНАЧЕНИЕ |
|---|---|
| ТИП ВСТРОЕННЫХ АККУМУЛЯТОРОВ | Ni-MH |
| ЭЛЕКТРИЧЕСКАЯ ЕМКОСТЬ | 2.9 А*ч |
| НОМИНАЛЬНОЕ НАПРЯЖЕНИЕ | 12 В |
| КОЛИЧЕСТВО ЭЛЕМЕНТОВ В СБОРКЕ | 10 шт |
| МАТЕРИАЛ КОРПУСА | Delrin |
| ДИАПАЗОН РАБОЧИХ ТЕМПЕРАТУР | -5 .. 50 °С |
1 Без учета веса блока батарей. Стандартный блок батарей ф50х165 мм, 0.58 кг, 2.9 Ач 12 В.
Время работы от стандартного блока батарей в режиме ожидания - до 70 часов, при излучении 1 раз в 3 секунды до 8 часов
2 Значение получено без учета эффекта многолучевого распространения
3 Значение может быть изменено по запросу
4 Получено в лабораторных условиях в статическом эксперименте
5 Стандартная комплектация, может быть изменена без уведомления
2.2.3. Варианты исполнения
Маяк Zima-R представляет собой приемопередатчик гидроакустической цифровой широкополосной связи и может сопрягаться с управляющей системой энергетически и информационно. В этом случае имеется возможность, при наличии у управляющей системы магнитного компаса, определять дистанцию и курсовой угол на базовую станцию, а также получать кодовые команды телеуправления от базовой станции. При автономном исполнении маяк комплектуется батарейной канистрой, как показано на рисунке 4. В этом случае он является полностью автономным и не требует сопряжения с носителем. В OEM исполнении маяк поставляется в виде комплекта электронных плат для установки пользователем в свой нормобарический корпус. Маяк комплектуется глубоководной гидроакустической антенной. Введение кабеля антенны в нормобарический корпус и коммутация с электроникой маяка в этом случае обеспечивается пользователем.
2.2.4. Работа с устройством (автономное исполнение)
В случае автономного исполнения маяк является полностью автономным. Для работы он должен фиксироваться на носителе таким образом, чтобы рабочие поверхности моноблока (цилиндрическая поверхность и торец) не перекрывались элементами крепежа (для крепления должен использоваться специальный паз) и не экранировались различными элементами конструкции носителя. Для включения маяка-ответчика требуется подключить его к батарейному блоку при помощи разъема, как показано на рисунке 5.
 |
|---|
| Рисунок 5 - подключение маяка-ответчика к батарейному блоку |
В данном исполнении маяк комплектуется никель-металлгидридной сборной батареей из 10 элементов. Нормобарический корпус (канистра) имеет крышку с двойным уплотнением и четырехзаходной резьбой, которая позволяет закрывать крышку канистры за 3/4 оборота. Перед погружением в воду необходимо убедиться, что крышка канистры плотно закручена (от руки). После подключения разъема маяка к батарейному блоку в течении первых десяти секунд устройство производит калибровку атмосферного давления, поэтому не допускается в течении первых десяти секунд с момента включения прибора прикладывать к нему какое-либо (отрицательное или положительное) давление, отличное от атмосферного - это приведет к некорректному измерению глубины маяком-ответчиком. При автономном исполнении Tx и Rx жилы кабеля маяка замкнуты (см. рисунок 6). Это приводит к автоматическому отключению модуля UART в целях энергосбережения.
ВНИМАНИЕ! Устройства Zima-R в автономном исполнении, выпущенные после октября 2020 года сигнализируют о своей работоспособности излучая сигнал через 1 секунду после подачи питания.
 |
|---|
| Рисунок 6a - Zima-R |
| габаритный чертеж |
 |
|---|
| Рисунок 6b - Zima-R |
| Назначение жил кабеля |
2.2.5. Работа с устройством (интегрируемое исполнение)
При энергетическом и информационном сопряжении с носителем, маяк передает на носитель дистанцию до базовой станции и азимут на маяк (только при подключенном к базовой станции магнитном компасе). Кроме того, в этом случае базовая станция может передать до 28 кодовых команд, о чем маяк-ответчик оповещает носитель в соответствие с протоколом сопряжения.
2.2.6. Хранение и обслуживание
Маяк-ответчик не требует каких-либо специальных процедур обслуживания, за исключением опреснения и промывки в проточной пресной воде, после использования в соленой и/или загрязненной воде. При этом не допускается применение каких-либо смазочных материалов или растворителей, агрессивных моющих средств и тп. для удалении загрязнений с маяка-ответчика и его кабеля.
В случае использования маяка в автономном исполнении предъявляются дополнительные требования и назначаются мероприятия по обслуживанию батарейного блока и канистры. В частности:
- не допускается длительное (более суток) хранение батарейного блока в подключенном к маяку состоянии;
- не рекомендуется длительное хранение батарейного блока без плановой подзарядки (1 раз в месяц);
- уплотнительные кольца и резьба батарейной канистры при наличии загрязнений должны очищаться при помощи воды, мягкой кисти и мыльного раствора с последующей промывкой в проточной пресной воде и смазкой уплотнительных колец силиконовой смазкой;
- хранение канистры производится с закрытой крышкой;
- при использовании устройства в соленой и/или загрязненной воде по окончании работ требуется произвести его опреснение в проточной пресной воде.
3. Пультовое ПО ZHost
3.1. Системные требования
Специализированное ПО ZHost (далее ПО) работает под управлением операционной системы MS Windows версий 7, 8 и 10. Рекомендуется монитор разрешением не менее 1024х768 пикселей и наличие мыши или тачпада. ПО является портируемым (Portable), распространяется в виде zip-архива (Скачать последнюю версию ) и не требует какой-либо установки, кроме распаковки на ПК пользователя.
Исполняемый файл ZHost.exe, файл настроек ZHost.settings и требуемые библиотеки располагаются в корневом каталоге приложения. Ресурсы локализации располагаются в подкаталогах, соответствующих языку локализации (напр. \ru, \ru-RU и т.п.). При работе приложение ведет файлы журналов. Журналы хранятся в подкаталоге \LOG, который содержит подкаталоги с именем текущей даты (например, \LOG\2020-01-21), в которых содержатся .log-файлы с именами, соответствующими времени создания файла (ЧЧ-ММ-СС). Новый файл журнала создается каждый раз при старте приложения. Файлы журналов имеют текстовый формат и содержат весь информационный обмен пультового ПО с подключенными к нему устройствами, а также все возникающие в процессе работы ПО ошибки.
При включенной функции АВТОСКРИНШОТ, снимки окна приложения сохраняются в католог \SNAPSHOTS, который также содержит подкаталоги по имени даты создания, файлы снимков окна именуются по текущему времени (ЧЧ-ММ-СС) и имеют формат PNG (Portable Network Graphics).
Поскольку коммутация с базовой станцией осуществляется посредством преобразователей интерфейса UART/RS-232/RS-422 в USB, то могут потребоваться дополнительные драйверы для конкретного преобразователя.
3.2. Описание интерфейса ПО ZHost
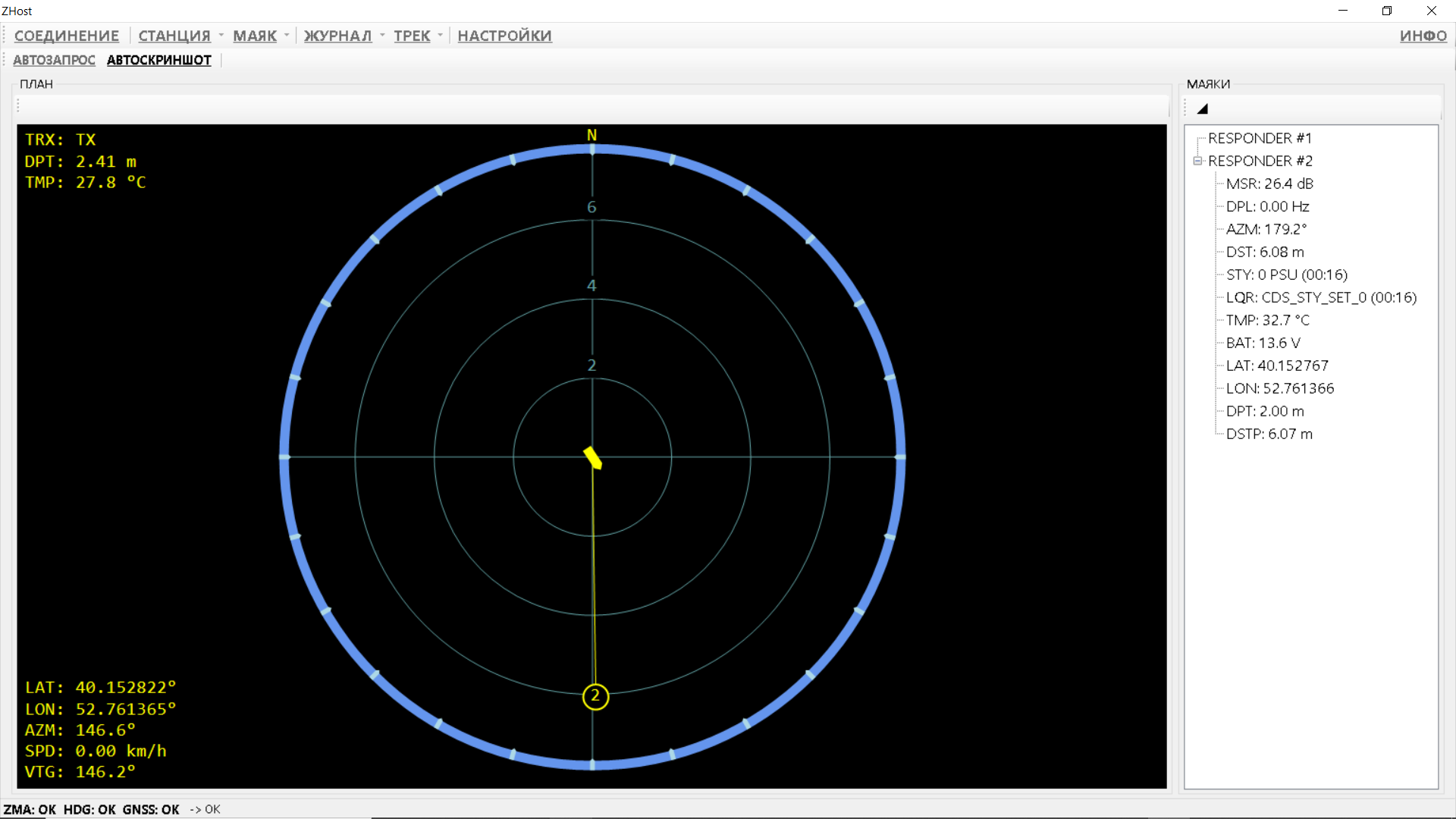
Общий вид окна приложения показан на рисунке 7. Оно состоит из панели инструментов (меню), расположенной в верхней части окна, панели статуса, расположенной в нижней части окна; слева располагается экран отображения относительного положения маяков-ответчиков (ПЛАН), а справа древовидная структура, содержащая свойства используемых маяков (МАЯКИ).
Панель инструментов состоит из верхней (СОЕДНИЕНИЕ, СТАНЦИЯ и т.п.) и нижней (АВТОЗАПРОС, АВТОСКРИНШОТ) субпанелей.
 |
|---|
| Рисунок 7 - Пультовое ПО ZHost |
| вид главного окна в процессе работы |
3.2.1 Панель инструментов
3.2.1.1. Пункт СОЕДИНЕНИЕ
Пункт меню “СОЕДИНЕНИЕ” служит для открытия и закрытия соединения по настроенным последовательным портам. К ним относится порт, через который происходит информационный обмен с базовой станцией, порты AUX, по которым в ПО могут поступать (при соответствующих настройках) навигационные данные от GNSS + GNSS компас или GNSS + магнитный компас, а также порт эмуляции GNSS для одного из маяков-ответчиков.
При нажатии на пункт меню “СОЕДИНЕНИЕ” приложение пытается открыть соединения по последовательным портам согласно заданным настройкам. Если не указаны дополнительные поставщики навигационных данных (GNSS, компас) и система работает в относительных координатах, то будет произведена попытка открыть порт для связи с базовой станцией. Если в настройках включены один или оба порта AUX и выходной порт эмуляции GNSS, то ПО произведет попытку открыть и их.
При удачном открытии портов, пункт меню “СОЕДИНЕНИЕ” становится выделенным, и последующее нажатие на него закроет соединения.
3.2.1.2. Пункт СТАНЦИЯ
Пункт меню “СТАНЦИЯ” становится активным только после того, как открыто соединение с базовой станцией и от нее успешно получена информация об устройстве. Пункт содержит подпункты:
- “ИНФОРМАЦИЯ” для вызова диалогового окна, содержащего информацию о подключенной базовой станции (серийный номер устройства, версия прошивки и т.п.).
- “КАЛИБРОВКА ГЛУБИНЫ” для вызова диалогового окна задания фактической глубины базовой станции.
3.2.1.3. Пункт МАЯК
Данный пункт меню становится активным только после того, как открыто соединение с базовой станцией и от нее успешно получена информация об устройстве, и при этом не активна функция “АВТОЗАПРОС”. Пункт содержит следующие подпункты:
- “ПОСЛАТЬ КОМАНДУ” для вызова диалогового окна отправки удаленной команды, в котором пользователь может выбрать адрес маяка-ответчика, которому необходимо отправить пользовательскую команду и идентификатор команды.
- “СМЕНИТЬ АДРЕС” для вызова диалогового окна смены адреса удаленного маяка-ответчика. В диалоговом окне необходимо указать текущий адрес маяка, которому необходимо изменить адрес и новый адрес. Стоит быть осторожным при использовании данной функции. Она предназначена только для настройки адресов маяков до погружения.
- “КАЛИБРОВКА АТМОСФЕРНОГО ДАВЛЕНИЯ” для вызова диалогового окна калибровки атмосферного давления. В диалоговом окне необходимо указать адрес маяка. При получении команды на калибровку атмосферного давления, маяк-ответчик примет текущие показания давления по встроенному сенсору за атмосферное. Стоит быть осторожным при использовании давнной функции. Она предназначена только для настройки маяков до погружения.
3.2.1.4. Пункт ЖУРНАЛ
Пункт меню “ЖУРНАЛ” содержит функции для работы с файлами журналов приложения и содержит следующие подпункты:
- “ПРОСМОТР”. При выборе данного подпункта будет открыт текущий файл журнала приложения.
- “АНАЛИЗИРОВАТЬ”. При выборе данного подпункта будет отображен диалог выбора файла для анализа. Функция анализа файла журнала позволяет быстро восстановить ход работы системы, например, для того, чтобы восстановить треки судна и/или маяков-ответчиков в случае его утери.
- “АНАЛИЗИРОВАТЬ ТЕКУЩИЙ”. Действие данной функции аналогично действию функции “АНАЛИЗИРОВАТЬ”, с тем отличием, что в качетстве анализируемого файла журнала будет выбран текущий.
- “ПЕРЕЗАПУСТИТЬ ТЕКУЩИЙ”. При задействовании данного подпункта, содержимое текущего файла журнала будет удалено и будет продолжена запись журнала.
- “УДАЛИТЬ ВСЕ ЖУРНАЛЫ”. Данный подпункт меню предназначен для удаления все журналов приложения из каталога LOG. Внимание! Данные из файлов журналов будут утрачены безвозвратно!
3.2.1.5. Пункт ТРЕК
Пункт меню “ТРЕК” содержит функции для работы с треками, формируемыми ПО и содержит подпункты:
- “СОХРАНИТЬ КАК…“ служит для вызова диалогового окна выбора имени и формата файла, для сохранения треков. Функция становится активна только при наличии в системе несохраненных географических данных. ПО поддерживает экспорт треков в форматы Keyhole Markup Language (KML) и Comma-separated values (CSV).
- “ОЧИСТИТЬ”. Данный подпункт служит для удаления всех географических данных, накопленных ПО за текущую сессию. Данную функцию стоит применять с осторожностью!
3.2.1.6. Пункт НАСТРОЙКИ
Пункт меню “НАСТРОЙКИ” активен только при закрытом соединении и служит для вызова диалогового окна изменения настроек ПО.
Настройки сохраняются в корневом каталоге приложения. Следует помнить, что для того, чтобы измененные и сохраненные настройки были задействованы приложением, его необходимо перезапустить. При успешном сохранении настроек ПО отобразит соответствующий запрос пользователю.
Настройки в диалоговом окне собраны в группы для удобства, каждая группа располагается на отдельной вкладке.
Кнопка “ВОССТАНОВИТЬ” служит для восстановления настроек по умолчанию.
Кнопка “ОК”, служащая для принятия настроек, активна только тогда, когда пользователем заданы непротиворечивые данные (например, при задействованных портах AUX имена для всех задействованных портов не должны совпадать друг с другом).
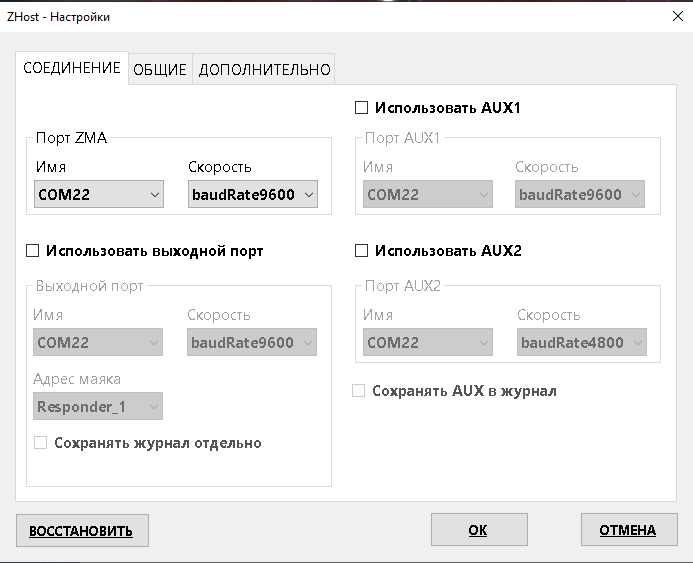
Вкладка “СОЕДИНЕНИЕ” содержит настройки портов соединения. Ее внешний вид показан на рисунке 8.
 |
|---|
| Рисунок 8 - Окно настроек |
| Вкладка “СОЕДИНЕНИЕ” |
Группа “Порт ZMA” активна всегда и отвечает за настройки соединения с базовой станцией Zima-B. В серийно выпускаемых устройствах поддерживается только скорость 9600 бит/с.
Остальные группы “Порт AUX1”, “Порт AUX2” и “Выходной порт” становятся активны только если установлен соответствующий флажок.
-
Если система Zima USBL используется с GNSS приемником с функцией определения азимута, то необходимо использовать только один из портов AUX, через который в систему поступают данные от этого приемника
-
Если система Zima USBL используется со стандартным GNSS-приемником, а данный о направлении поставляются от магнитного компаса, то следует использовать оба порта AUX, к одному из них подключается GNSS-приемник, а к другому - магнитный компас.
Если флажок “Сохрянять AUX в журнал” не установлен, то данные, приходящие из портов AUX не будут сохраняться в файл журнала.
Если система работает в абсолютных координатах (т.е. в неё поступают данные о географическом местоположении базовой станции и ориентации ее относительно сторон света) и вычисляются абсолютные геогрфические координаты маяков-ответчиков, то возникает возможность эмулировать сообщения GNSS RMC и GGA на основе геогрфического положения маяка и передавать их в выходной порт.
Это может быть, например, виртуальный COM-порт, ко второму концу которого может подключаться картографическое ПО (например, SAS.Planet) для отображения местоположения маяка на карте в реальном времени. Для включения этой функции необходимо установить флажок “Использовать выходной порт” и задать требуемые настройки порта, а также указать адрес маяка, на основе координат которого будут эмулироваться данные GNSS.
При установленном флажке “Сохранять журнал отдельно”, данные, передаваемый в выходной порт будут сохраняться в отдельный журнал.
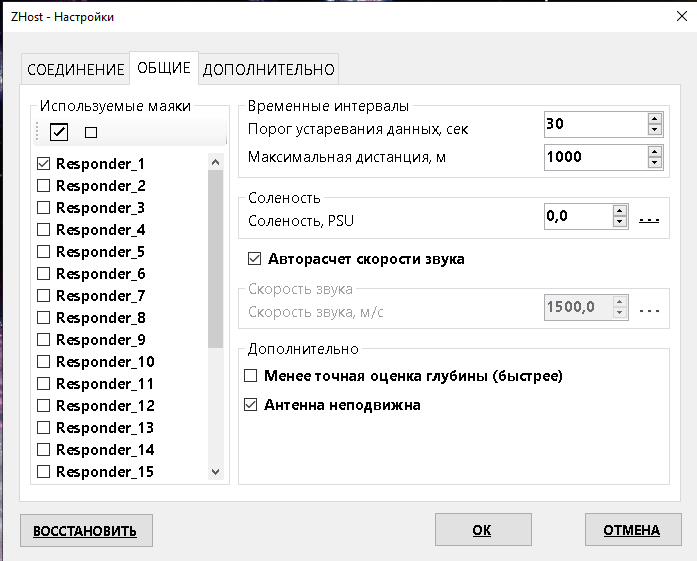
Вкладка “ОБЩИЕ” содержит настройки адресов используемых маяков и некоторые физические параметры. Ее внешний вид показан на рисунке 9.
 |
|---|
| Рисунок 9 - Окно настроек |
| Вкладка “ОБЩИЕ” |
Группа “Используемые маяки” содержит список всех возможных адресов маяков. Система будет автоматически опрашивать маяки, напротив адресов которых в этом списке установлены флажки.
Группа “Временные интервалы” содержит настройки:
- порога устаревания данных (в секундах). Если значение не обновлялось более указанного временного интервала, рядом с ним в скобках будут отобржаться символы OBS (Obsolete), указывая оператору на то, что данный конкретный параметр (например, температура воды или напряжение питания маяка) давно не обновлялся
- Максимальная дистанция. Данный параметр указывает системе максимальное расстояние, на котором может находится маяк-ответчик. Этот параметр ответчает за то, сколько базовая станция будет ожидать ответа маяка. Если по какой-либо причине станция не принимает ответный сигнал маяка, она ждет его в течении определенного времени, называемым времнем таймаута. Имеет смысл устанавливать минимально возможные значения исходя из требований задачи, для того, чтобы ограничить время простоя системы, когда она будет ожидать пропущенный ответ маяка.
Группа “Соленость” позволяет задать значение солености воды (в PSU) или напрямую, или выбрать из базы соленостей мирового окена (вызвав диалог выбора солености по ссылке ”. . .”. Не рекомендуется брать соленость из базы для малых внутренних водоемов: рек, озер, прудов и тп. В данном случае, если точно значение не известно, установить нулевую соленость (пресная вода). Значение солености используется системой для более точного определения глубин и скорости звука.
Флажок “Авторасчет скорости звука” и управляемая им соответствующая группа отвечают за то, откуда система будет брать скорость звука в воде. Если это значение известно непосредственно из измерения, стоит отключить функцию автоматического расчета и указать значение напрямую. В остальных случаях флажок должен быть установлен. При этом система будет рассчитвать скорость звука по давлению, температуре и солености. Как правило, рассчетное значение хорошо согласуется с фактическим.
Группа “Дополнительно” содержит:
- Флажок “Менее точная оценка глубины”. Если эта функция включена, маяк будет передавать глубину с меньшим разрешением (~40 см), но при этом глубина будет передаваться за одну транзакцию “запрос-ответ”, а фукнция одновременной навигации (отправка на маяк обратного азимута на базовую станцию и измерение маяком дистанции до базовой станции) будет недоступна. Если не требуется функция одновременной навигации (например, если применяется маяк в автономном исполнении) и точность в 40 см по глубине достаточна, следует установить данный флажок.
- Флажок “Антенна неподвижна” предназначен для ситуации, когда система работает в относительных координатах, а базовая станция закреплена неподвижно (например, на пирсе или другом стационарном объекте портовой инфраструктуры) так, что ее горизонтальная ось направлена на север. В таком режиме возможна передача обратного азимута на маяки-ответчики без необходимости наличия GNSS-приемника и компаса.
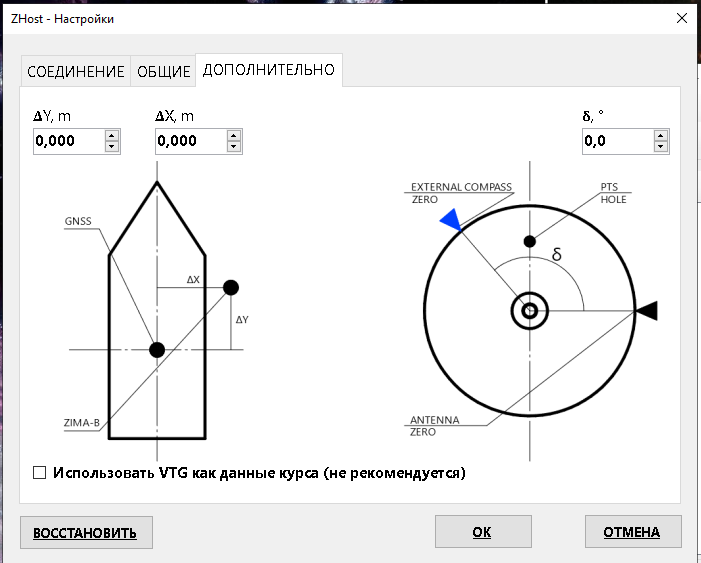
Вкладка “ДОПОЛНИТЕЛЬНО” содержит настройки ориентации базовой станции относительно точки топопривязки (антенны GNSS) и направления нуля компаса. Ее внешний вид показан на рисунке 10.
 |
|---|
| Рисунок 10 - Окно настроек |
| Вкладка “ДОПОЛНИТЕЛЬНО” |
- Параметры “ΔX” и “ΔY” (в метрах) определяют расположение базовой станции в прямоугольной системе координат, связанной с антенной GNSS-приемника (согласно рисунку)
- Параметр “δ“ (в градусах) задает поворот нуля антенны базовой станции относительно нуля магнитного или GNSS-компаса
3.2.1.7. Пункт АВТОЗАПРОС
Данный пункт меню управляет режимом “АВТОЗАПРОС”. При включении этого режима ПО будет автоматически с максимально возможной скоростью опрашивать маяки-ответчики согласно списку “Используемые маяки” вкладки “ОБЩИЕ” окна настроек приложения. Режим “АВТОЗАПРОС” является основным рабочим режимом системы и должен отключаться только в тех случая, когда навигационные данные не требуются или необходима передача пользовательской команды на один или несколько маяков (при включенном режиме “АВТОЗАПРОС” данная функция недоступна).
3.2.1.8. Пункт АВТОСКРИНШОТ
Если данная функция включена, ПО будет автоматически сохранять изображение главного окна при обновлении данных. Файлы располагаются в каталоге “\SNAPSHOTS\YYYY-DD-MM", где “YYYY-DD-MM” - текущая дата. Каждый файл именуется согласно текущему времени в формате “HH-MM-SS” и имеет формат Portable Network Graphics (*.png).
3.2.2 Панель ПЛАН
На этой панели (см. рис. 7) в центре отображается положение базовой станции в виде желтой стрелки, которая ориентирована снизу вверх при работе в относительных координатах и изменяет свою ориентацию, при доступных данных курса. В последнем случае в верху лимба отображается символ “N” (North, Север). Панель “ПЛАН” отображает положение маяков относительно базовой станции. Маяки отображаются в виде кружков с адресом маяка внутри. При возникновении таймаута (превышении интервала ожидания ответа маяка) соответствующие маяки отображаются пунктирной линией.
В левом верхнем углу отображается текущее состояние базовой станции:
- TRX: состояние приемопередатчика (TX - идет передача, RX - ожидание ответа, READY - готова к запросам)
- DPT: глубина (расстояние от поверхности воды) базовой станции по показаниям встроенного датчика давления
- TMP: температура воды по показаниям встроенного датчика температуры
В левом нижнем углу отображаются дополнительные данные, получаемые системой через порты AUX:
- LAT, LON: географичекие широта и долгота (из сообщений RMC)
- AZM: азимутальный угол (из сообщений HDG или HDT)
- SPD: скорость (из сообщений VTG)
- VTG: курс движения (из сообщений VTG)
3.2.3 Панель МАЯКИ
Отображает данные маяков-ответчиков в виде древовидной структуры, где узлы первого уровня обозначают маяки (“RESPONDER #ХХ”), каждый из которых имеет набор узлов, обозначающих различные парметры и характеристики маяков в виде Идентификатор параметра: Значение. Ниже представлен список возможных идентификаторов параметров и их описания.
| Идентификатор параметра | Единицы измерения | Описание | Источник |
|---|---|---|---|
| MSR | дБ | Mean lobe-to-sidepeak ratio. Характеристика качества приема. Порог приема 14, значения выше 20 - хороший прием | Определяется базовой станцией при приеме ответа маяка |
| DPL | Гц | Доплеровский сдвиг несущей частоты | Определяетя базовой станцией при приема ответа маяка |
| AZM | ° | Азимут на маяк | Определяется базовой станцией при приеме ответа маяка |
| DST | м | Наклонная дальность до маяка | Определяется базовой станцией при приема ответа маяка |
| STY | PSU | Значение солености, которое было задано маяку | Из ответа маяка, который подтверждает задание параметра |
| LQR | - | Результат последнего сервисного запроса | Определяется логикой ПО ZHost |
| TMP | °C | Окружающая температура (температура воды) | Из ответа маяка, по данным встроенного датчика маяка |
| BAT | В | Напряжение питания маяка | Из ответа маяка, как результат прямого измерения |
| LAT | ° | Географическая широта маяка | Определяется логикой ПО ZHost |
| LON | ° | Географическая долгота маяка | Определяется логикой ПО ZHost |
| DPT | м | Глубина (расстояние от поверхности воды) маяка | Из ответа маяка, по данным встроенного датчика глубины |
| DSTP | м | Проекция наклонной дальности на поверхность воды | Определяется логикой ПО ZHost |
Справа от каждого значения отображется возраст данных - время, которое прошло с момента, когда значение параметра было обновлено. Возраст отображается только в том случае, если он превышает 7 секунд.
3.2.3 Панель статуса
Располагается в нижней части окна и отображает состояние соответствующих устройств:
- ZMA: базовая станция
- GNSS: географическое положение
- HDG: источник данных об азимуте
4. Эффективное применение навигационной системы Zima USBL
Система Zima USBL является гидроакустической ультракороткобазисной системой, которая определяет относительное местоположение маяков-ответчиков по времени распространения акустического сигнала в воде и углу прихода ответного сигнала маяков-ответчиков.
В связи с этим, эффективное ее применение основывается на соблюдении следующих условий:
- обеспечение стабильного положения базовой станции во время работы; Данное условие обеспечивается надежным закреплением базовой станции на вертикальной штанге, с учетом направления нуля антенны пеленгования. Угловые отклонения вертикальной оси станции от вертикали а также отклонения и колебания ее нуля негативно сказываются на точности определения угла прихода ответного сигнала;
- обеспечение прямой видимости между базовой станцией и маяком-ответчиком; Поскольку дистанция до маяка-ответчика определяется по времени распространения гидроакустического сигнала в воде, то любые препятствия на пути прохождения сигнала сильно искажают измеряемое время распространения, а следовательно и определяемую дистанцию до маяка-ответчика; к препятствиям можно отнести как естественные, связанные с рельефом дна и/или береговым профилем, так и искусственные - пирсы, причальные стенки, суда с глубокой осадкой, опоры мостов и иные технические сооружения;
- рабочие поверхности должны быть свободны от различных загрязнений (ил, грязь, водоросли и т. п.);
Ввиду специфики распространения звуковых колебаний в водной среде базовую станцию не следует располагать на глубине, меньшей, чем 2 - 3 ** метра и как минимум **1.5 метра от нижней части киля для малых лодок и не менее 2 - 3 метров для крупных лодок.
Антенная решетка базовой станции предназначена для определения горизонтального угла прихода сигнала маяков-ответчиков, поэтому стоит помнить, что при таком взаимном расположении антенны и маяка-ответчика, когда они находятся практически на одной вертикальной оси, точность определения местоположения ответчика будет минимальной. Хорошим взаимным расположением антенны и маяка-ответчика считается такое, при котором проекция наклонной дальности на водную поверхность значительно превышает проекцию ее на вертикальную ось. Рабочими вертикальными углами базовой станции Zima-B являются углы +/- 30° от горизонтальной плоскости, проходящей через антенную решетку базовой станции. Данное положени проиллюстрировано на рисунке 11:
 |
|---|
| Рисунок 11 - Геометрические ограничения Zima-B |
| 1 - рабочая зона (+/- 30°), 2 - зона снижения точности (30 .. 45°), 3 - теневая зона ( > 45°), 4 - пеленгационная антенна. Отклонение указывается от горизонтальной плоскости, проходящей через центр антенной решетки |
5. Возможные неисправности, их диагностика и устранение
| № | Симптомы | Возможная причина | Устранение |
|---|---|---|---|
| 1 | Не удается установить соединение ZHost и Zima-B (Ошибка “Нет доступа к COM-порту) | Особенность работы драйверов преобразователя RS422-USB в системах Win8-10 | 1. Отключить питание станции Zima-B 2. Отсоединить разъем USB 3. Закрыть приложение ZHost 4. Подсоединить разъем USB 5. Запустить приложение ZHost 6. Нажать кнопку СОЕДИНЕНИЕ в ZHost 7. Подать питание на станцию Zima-B |
| 2 | Станция излучает запросный сигнал, но маяк не отвечает | Гидрология не позволяет обеспечить устойчивую связь | Проверить исправность маяка на малой дистанции (0.5-10 метров) в прямой видимости |
| Не подключен разъем питания на маяке | Подключить разъем | ||
| Разряжен АКБ батарейного блока маяка | Зарядить или заменить батарейный блок | ||
| Запрашиваемый адрес маяка не соответствует его фактическому | В настройках ZHost выбрать все доступные адреса, станция переберет все поочередно и таким образом адрес маяка будет установлен | ||
| Возможно, сигнал излучается неполностью и станции не хватает питания | Такое возможно при питании станции от источников питания, имеющих ограничение по току. Для нормальной работы в режиме передачи станции необходимо порядка 3А | ||
| 3 | Нет связи со станцией Zima-B, порт открыт, но станция не передает данные | На станцию не приходит питание | Проверить источник питания и соединительные кабеля |
| Станция неисправна | Заменить станцию | ||
| 4 | Определяемый угол прихода имеет статическую ошибку | Нулевые направления станции и компаса (или продольной оси судна) расположены под углом - станция повернута в хомуте | Совместить нулевое направление станции с продольной осью судна и/или нулевым направлением компаса и исключить случайное проворачивание антенны в хомуте |
| 5 | Система работает, маяк отвечает но абсолютное местоположение маяка не вычисляется (при подключенном внешнем GNSS-приемнике, компасе или GNSS-компасе) | Не обновляются данные о географическом положении и курсе судна | Проверить исправность GNSS-приемника и магнитного/GNSS компаса а также соединительных кабелей и настроек портов |
6. Обязательства и отказ от ответственности
6.1 Условия замены и бесплатного гарантийного обслуживания
Гарантия производителя распространяется только на заводские дефекты, выявивщиеся при эксплуатации устройства в соответствие с настоящим руководством в течении гарантийного срока (2 года с момента покупки).
Производитель гарантирует бесплатный ремонт или замену неисправного оборудования из комплекта поставки, вышедшего из строя по причине заводского дефекта.
К поводам для отказа от бесплатного гарантийного обслуживания, бесплатного ремонта и замены относятся:
- любые механические повреждения оборудования из комплекта поставки, в т.ч. нарушение изоляции проводов и кабелей;
- любые повреждения, вызванные воздействием влаги и загрязнейний, вследствие неправильной эксплуатации оборудования из комплекта поставки;
- любые электрические повреждения, вызванные использованием некомплектных аксессуаров; к некомплектным не отностятся аксессуары, поставленные производителем или его представителем в замен неисправных или утраченых;
- любые следы самостоятельного ремонта и/или вскрытия оборудования из комплекта поставки.
6.2 Ограничение ответственности производителя
ЛЮБАЯ ИЗ ЧАСТЕЙ КОМПЛЕКТА ПОСТАВКИ В ОТДЕЛЬНОСТИ И В СОСТАВЕ СИСТЕМЫ, ИМЕНУЕМЫЕ ДАЛЕЕ “ПОСТАВЛЯЕМОЕ ОБОРУДОВАНИЕ”:
- НЕ РАЗРАБАТЫВАЛОСЬ КАК СРЕДСТВО СПАСЕНИЯ
- НЕ ТЕСТИРОВАЛОСЬ, КАК СРЕДСТВО СПАСЕНИЯ
- НЕ ЯВЛЯЕТСЯ СРЕДСТВОМ СПАСЕНИЯ
- ПРОИЗВОДИТЕЛЬ ЗАЯВЛЯЕТ, ЧТО ПОСТАВЛЯЕМОЕ ОБОРУДОВАНИЕ БЕЗОПАСНО ПРИ ЭКСПЛУАТАЦИИ СОГЛАСНО НАСТОЯЩЕЙ ИНСТРУКЦИИ И НЕ ОТВЕЧАЕТ ЗА ЛЮБЫЕ ПОСЛЕДСТВИЯ ИСПОЛЬЗОВАНИЯ ПОСТАВЛЯЕМОГО ОБОРУДОВАНИЯ