docs.unavlab.com
 |
|
|---|---|
| www.unavlab.com support@unavlab.com |
Zima USBL Data brief |
General information
Zima USBL - underwater acoustic ultrashort-baseline (USBL) navigation system designed to determine the location underwater objects marked by responder-beacons Zima-R using direction-finding antenna Zima-B.
System composition
 |
Zima-B Base station |
 |
Zima-R Responder-beacons (One base station supports up to 23 responder-beacons) |
 |
Bat&Link Box Autonomous power supply and interfacing unit |
Tasks that system solves
- Locating up to 23 underwater objects in the water area (tracking underwater objects)
- Estimation of relative location (azimuth, distance, depth)
- Estimation of absolute location (latitude, longitude, azimuth, distance, depth) when connecting external GNSS and compass (or GNSS with compass function)
- Mutual navigation: transmission of the azimuth to the beacon on the direction-finding antenna and measurement of the distance by the beacon to the antenna (when pairing the beacon with the ROV/AUV and when connecting an external compass or GNSS with the compass function to the control PC);
- Remote control: transmission of up to 32 code commands to underwater objects (when pairing of the beacon with the carrier);
Key features
- Compactness, long-range and maximum ease of use allows using Zima USBL system for working with various ROVs, AUVs and with divers in any combination
- The high versatility of the beacons allows them to be used both stand-alone with a separate battery pack, and paired with the underwater vehicle, in this case, it is possible to transmit up to 32 address code commands of telecontrol to an underwater vehicle
- The system supports integration with external sources of navigation data: GNSS and a magnetic compass (connected to the control PC). In this case, the system determines the absolute geographical coordinates of underwater objects, allows saving the track of the movement of underwater objects and has GNSS emulation functions for one of the selected responder-beacons for integration with third-party software (for example, Hypack, SAS.Planet, etc.)
- Zima-B antenna is mounted on the rod from the side of almost any vessel. It can be connected to a 12 V / 3.5 A power supply, and to a control PC (Windows 7 and above) - in this minimum configuration, the system determines the position of the beacons (azimuth and distance) relative to the antenna. When connecting a GNSS receiver (RMC, GGA) and magnetic compass (HDG/HDT) the system determines the geographical coordinates of the beacons and can transmit them (RMC, GGA) to any serial port, thereby emulating a GNSS receiver;
- Instead of a magnetic compass, a GNSS system with several antennas can be used (HDT sentences);
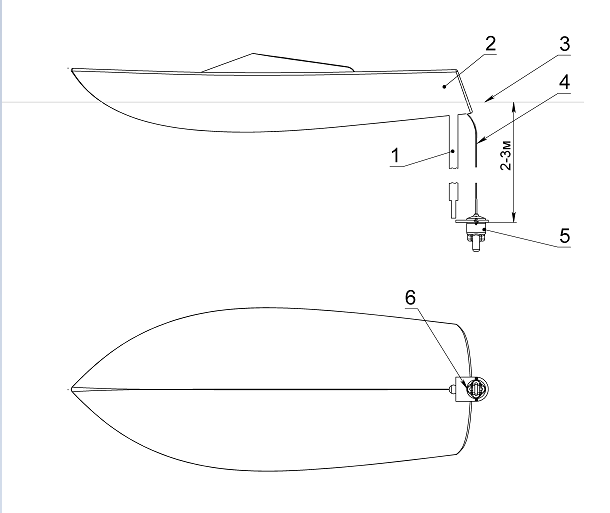 |
|---|
| Zima-B Installation scheme 1 - rod, 2 - boat, 3 - water surface, 4 - cable, 5 - antenna Zima-B, 6 - antenna’s direction |
Working options
Working in relative coordinates
To determine the relative location of the responder-beacons, the antenna is paired to a control PC on which it is installed open-source software ZHost. The antenna connects to the PC via Bat & Link Box, which provides the conversion of the interface to USB and antenna power. In this case, the user has access to data and functions:
- Azimuth (horizontal angle) to the used responder-beacons;
- Distance to responder-beacons;
- Depths of responder-beacons;
- Ability address transmission of up to 32 code commands for each responder-beacon (when responder-beacons is paired with a underwater vehicle).
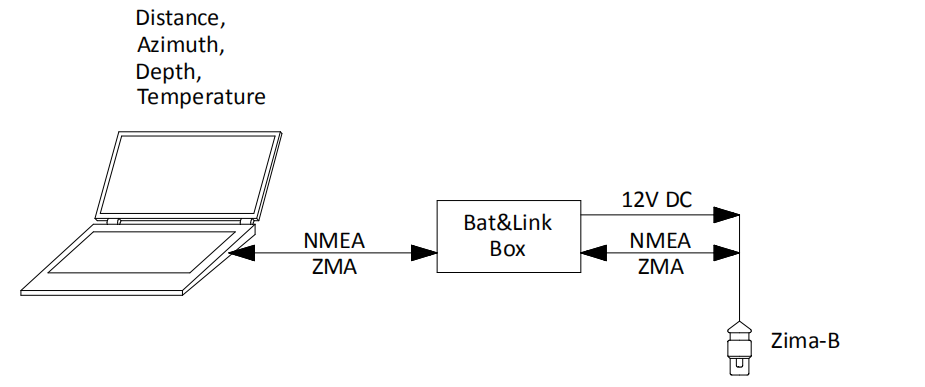 |
|---|
| Connection scheme for relative coordinates |
Working in absolute coordinates
To determine the absolute location of the responder-beacons, the antenna is paired with the PC on which ZHost software is installed. The antenna connects to the PC via Bat & Link Box, which provides the conversion of the interface to USB and antenna power. Also, an external GNSS system and a magnetic compass working under the NMEA0183 protocol (messages RMC and HDG) are connected, or external GNSS - a system with a compass function operating on the NMEA0183 protocol (messages RMC and HDT).
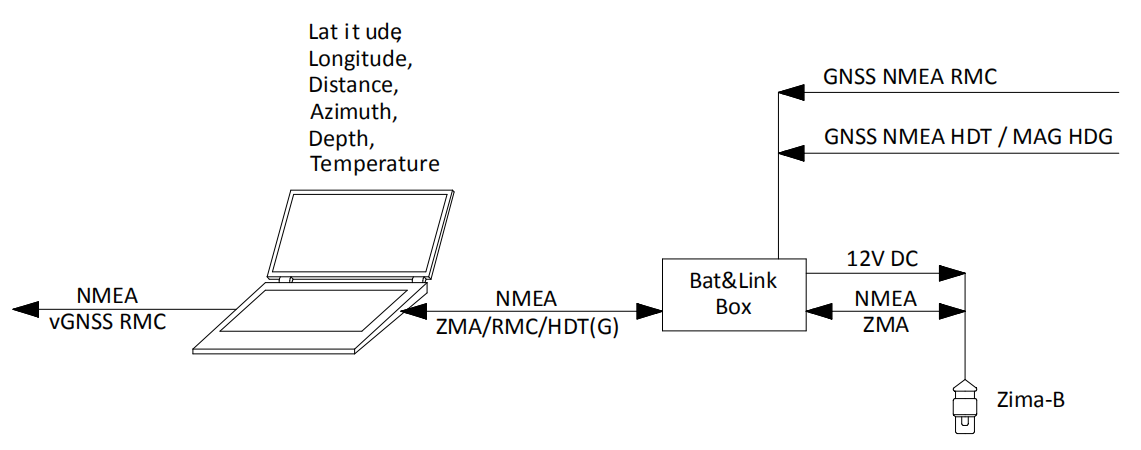 |
|---|
| Connection scheme for absolute coordinates |
In this case, the following data and functions are available to the user:
- Absolute geographic coordinates and depth of responder-beacons;
- Azimuth (relative to north)
- Distance
- Ability address transmission of up to 32 code commands for each responder-beacon (when responder-beacon is paired with the underwater vehicle);
- Recording of the motion track of underwater objects with the possibility of saving in Google KML format.
Geometric limitations
Since the location of the responder-beacons Zima-R is determined by the horizontal angle of arrival of the signal, slant range and depth difference, the phased array of the direction-finding station Zima-B has the best sensitivity in the horizontal plane. This imposes geometric limitations on the relative positioning of the direction-finding antenna and responder-beacons. The working vertical angle of the antenna is +/-30° from the horizontal plane. It is possible, but not recommended, to work with such relative positions of the antenna and the responder-beacon when the vertical angle to the beacon is in the range from 30° to 45° due to a decrease in the accuracy of determining the angle of arrival of the signal. Operation at vertical angles to the responder-beacons above 45° is highly not recommended.
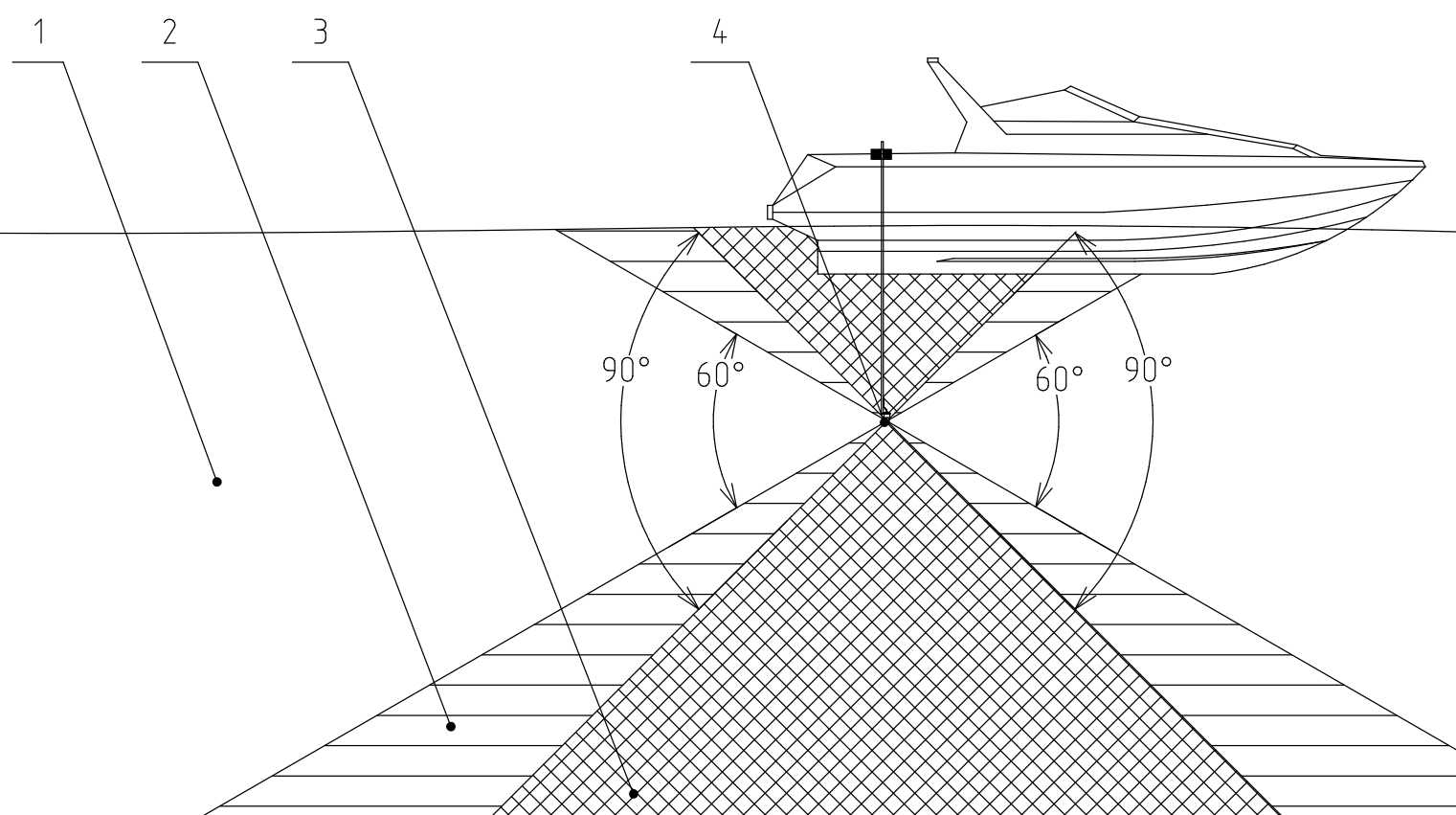 |
|---|
| Geometric limitations Zima-B 1 - working zone (+/- 30°), 2 - low accuracy zone (30 .. 45°), 3 - shadow zone ( > 45°), 4 - direction-finding antenna. The deviation is indicated from the horizontal plane passing through the centre of the antenna phased array |
The export version of the system is limited in range to 3000 meters