docs.unavlab.com
Главная ❯ Гидроакустические навигационные и трекинговые системы ❯ Zima2 USBL: Рукводство пользователя
ℹ Рекомендации для печати/сохранения в PDF
- Нажмите Ctrl+P (macOS: Cmd+P)
- В настройках принтера выберите «Сохранить как PDF» (Microsoft Print to PDF)
- В поле «Страницы» укажите диапазон, исключая первую и последнюю страницу
- Отключите верхние и нижние колонтитулы (заголовки/URL/page numbers)
- В Chrome/Edge: в доп. настройках → «Поля» → Нет | в Firefox: «Поля и колонтитулы» → Нет
- Нажмите Печать и укажите куда сохранить PDF
 |
|
|---|---|
| www.unavlab.com support@unavlab.com |
Zima2 USBL - гидроакустическая навигационная система Руководство пользователя |
Zima2 USBL
Руководство пользователя
Содержание
- 1.1. Назначение
- 1.2. Особенности
- 1.3. Состав системы
- 1.4. Исполнения
- 2.0. До проведения работ
- 2.1. Подготовка к работе и проверка оборудования
- 2.2. Приложение AzimuthConsole
- 2.3. Приложение AzimuthSuite (устаревшее)
- 2.4. Работа с системой
- 2.4.1. Взаимодействие с системой
- 2.5. По завершении работ
- 3.1. Условия замены и бесплатного гарантийного обслуживания
- 3.2. Ограничение ответственности производителя
1. Введение
1.1. Назначение
Подводная акустическая навигационная система Zima2 предназначена для определения местоположения подводных объектов, оснащенных маяками-ответчиками Zima2-R в реальном времени.
Маяки-ответчики (далее маяки) могут устанавливаться на:
- телеуправляемые подводные аппараты (ТНПА)
- обитаемые подводные аппараты (ОПА)
- автономные необитаемые подводные аппараты (АНПА)
- дайверов и технических водолазов (в случае использования автономной версии маяка).
Система позволяет определять:
- относительное местоположение подводных объектов (азимутальный угол, дальность, глубина)
- абсолютное местоположение подводных объектов (широта, долгота, глубина) при использовании внешних источников навигационных данных (GNSS-приемник и компас) .
1.2. Особенности
Навигационная система Zima2 является ультракороткобазисной навигационной системой (УКБ, англ. USBL), принцип работы которой основан на применении фазированной антенной решетки для определения горизонтального угла прихода сигнала и определения дистанции до маяка методом “запрос-ответ”. Система Zima2 использует современную технологию цифровой широкополосной помехоустойчивой гидроакустической связи, а применяемый сигнал специально разработан для сложных гидрологических условий, в том числе условий, характерных для мелких водоемов.
1.3. Состав системы
Система включает в себя:
- Пеленгационную антенну Zima2-B
- Кабель с интегрированным преобразвателем интерфейса RS-422 uWire
- Маяк-ответчик Zima2-R
- Блок питания и коммутации Bat&Link Box
- Подводная аккумуляторная сборка (батарейный блок) SB-24-48-LF.
 |
|---|
| Пеленгационная антенна Zima2-B |
 |
| Кабель UART-RS422 с интегрированным преобразователем интерфейса |
 |
| Маяк-ответчик Zima2-R (интегрируемое исполнение) |
 |
| Маяк-ответчик Zima2-R с батарейным блоком (автономное исполнение) |
 |
| Блок питания и коммутации Bat&Link Box |
Мы постоянно работаем над совершенствованием наших изделий, поэтому внешний вид, цвет, тип применяемый разъемов, кабелей, зарядных устройств может незначительно отличаться.
1.4. Исполнения
Система имеет различные исполнения для разных диапазонов глубин. Когда в настоящем документе речь идет о базовой версии устройства, например, о Zima2-B, стоит это понимать, как относящееся ко всем исполнениям устройства, если нет каких-либо дополнительных уточнений.
ВНИМАНИЕ! Устройства разных исполнений не совместимы между собой и применение их в составе одной системы приведет к получению пользователем заведомо неверных навигационных данных.
1.4.1. Стандартное исполнение
В стандартном исполнении система позволяет работать на глубинах до 300 м. Доступны варианты питания маяка-ответчика как от носителя, так и от автономного источника.
| Устройство | Техническая спецификация |
|---|---|
| Пеленгационная антенна Zima2-B | |
| Маяк-ответчик Zima2-R |
1.4.2. Исполнение 35
В этом исполнении система позволяет работать с маяками-ответчиками, находящимися на глубинах до 350 м. Встроенные датчики давления в маяках-ответчиках имеют защитную металлическую мембрану. Доступны варианты питания маяка-ответчика как от носителя, так и от автономного источника.
| Устройство | Техническая спецификация |
|---|---|
| Пеленгационная антенна Zima2-B35 | |
| Маяк-ответчик Zima2-R35 |
1.4.3. Исполнение K
В этом исполнении система позволяет работать с маяками-ответчиками, находящимися на глубинах до 1000 м. Маяк-ответчик поставляется в металлическом нормобарическом корпусе с антенной на кабеле. Доступен только вариант с питанием от носителя.
| Устройство | Техническая спецификация |
|---|---|
| Пеленгационная антенна Zima2-BK | |
| Маяк-ответчик Zima2-RK |
2. Работа с системой Zima2
2.0. До проведения работ
Для работы с системой требуется специализированное программное обеспечениe 🖵 AzimuthConsole. По ссылке для скачивания доступны сборки для всех поддерживаемых платформ.
Ранее использовалось приложение 🐙 AzimuthSiute, работающее под управлением Windows.
Заранее скачайте необходимое ПО. Установка не требуется - достаточно просто распаковать содержимое архива в удобное для вас место. Перед выездом на водоем убедитесь, что все оборудование полностью заряжено, и при необходимости зарядите все устройства.
Особое внимание стоит уделять блокам питания и коммутации и маякам-ответчикам: в виду того, что эти устройства имеют встроенные источники питания на основе LiFePO4, они имеют очень пологую разрядную характеристику и определить степень заряда встроенного источника сложно. Поэтому рекомендуется перед использованием не раньше чем за 1-2 дня выполнить зарядку всех устройств.
Мы применяем аккумуляторы на основе LiFePO4 так как они являются наиболее долговечными и выдерживают максимальное число циклов-заряд разряд по сравнению с аккумуляторами Li-ion и Li-Po, а также могут работать при низких температурах.
2.1. Подготовка к работе и проверка оборудования
2.1.1. Расположение и настройка пеленгационной антенны
ВНИМАНИЕ!!!
В ОТЛИЧИЕ ОТ ПРЕДЫДУЩЕЙ ВЕРСИИ СИСТЕМЫ ПОЛОЖЕНИЕ НУЛЕВОГО НАПРАВЛЕНИЯ АНТЕННЫ БЫЛО ИЗМЕНЕНО!
Нулевое направление антенны совпадает с литьевым швом со стороны, где антенная решетка ближе к поверхности цилиндра (см. рис. ниже). Ось Z направлена вниз, азимутальный угол отсчитывается от нулевого направления по часовой стрелке, если смотреть на антенну со стороны кабеля.
 |
|---|
| Нулевое направление антенны |
| Горизонтальный угол отсчитывается по часовой стрелке от нулевого направления антенны, вертикальная ось направлена вниз |
Крепление антенны должно осуществляться комплектным кронштейном uClamp-S. Верхняя часть кронштейна имеет выборку, обозначающую ноль антенны.
Антенна определяет горизонтальный угол прихода сигнала относительно своего нулевого направления, необходимо соблюдать следующие требования при креплении антенны:
- Антенна должна располагаться на опускной штанге, обеспечивающей ее стабильное положение не ближе 2 метров от поверхности воды и не выше 1.5 от нижней точки киля судна
- Антенна должна закрепляться при помощи хомута таким образом, чтобы ее положение во время работы не изменялось (антенна не должна проворачиваться внутри хомута)
- Антенна не должна быть сильно сдавлена креплением
- Крепление и его части не должны выступать ниже крепежного паза и таким образом перекрывать рабочие поверхности антенны
- Крепление и его части не должны перекрывать отверстие датчика давления
- Тонкий кабель, выходящий из антенны не должен изгибаться с радиусом, меньшим 50 мм, толстый кабель - с радиусом, меньшим 100 мм.
Не рекомендуется установка антенны вблизи крупных объектов: причальных стенок, пирсов, молов, крупных судов, массивных опор и прочих объектов водной инфраструктуры.
Антенна подключается к блоку питания и коммутации при помощи удлиняющего кабеля с интегрированным преобразователем интерфейса. На кабеле присутствуют два разъема: один надводный - для подключения к блоку питания и коммутации, другой - подводный, для подключения антенны.
Перед погружением антенны необходимо убедиться:
- В отсутствии влаги, следов коррозии и загрязнений в обоих частях подводного разъема антенны
- В целостности уплотнений на обеих частях подводного разъема
- Наличием на уплотнениях подводного разъема достаточного количества густой силиконовой смазки
- В том, что разъем сомкнут и крепежное кольцо плотно закручено от руки
ВНИМАНИЕ!
Попадание воды внутрь любых разъемов совершенно недопустимо и приведет к негрантийной поломке!
Удлиняющий кабель не должен иметь больших свободных провисов на длине его погружения в воду. Кабель рекомендуется крепить к штанге при помощи веревки или нейлоновых стяжек.
ВНИМАНИЕ!
Перед подключением антенны к блоку питания и коммутации посредством удлиняющего кабеля убедитесь, что блок питания коммутации выключен!
Рекомендуется следующая последовательность действий при установке антенны:
- проверить подводный разъем антенны
- подключаить антенну к удлиняющему кабелю сомкнув и закрутив подводный разъем
- установить антенну в хомут
- закрепить кабель на штанге при помощи нейлоновых стяжек или отрезков веревки в точках, расположенных не реже 500 мм
- убедиться, что блок питания и коммутации выключен
- подключить надводный разъем удлиняющего кабеля к блоку питания и коммутации
- подключить блок питания и коммутации к ПК при помощи кабеля USB-B
Для исполнения блока питания и коммутации с двумя каналами (для подключения внешнего GNSS-компаса) требуются дополнительные шаги:
- подключите GNSS-компас к комплектному кабелю
- подключите кабель GNSS-компаса к блоку питания и коммутации
Включение блока питания и коммутации необходимо выполнять после запуска специализированного ПО на пультовом ПК. Работа с ПО и настройка описаны ниже.
Для уточнения наименований разъемов на панели блока питания и коммутации обратитесь к инструкции по эксплуатации блока питания и коммутации Bat&Link Box.
2.1.2. Расположение маяка на носителе
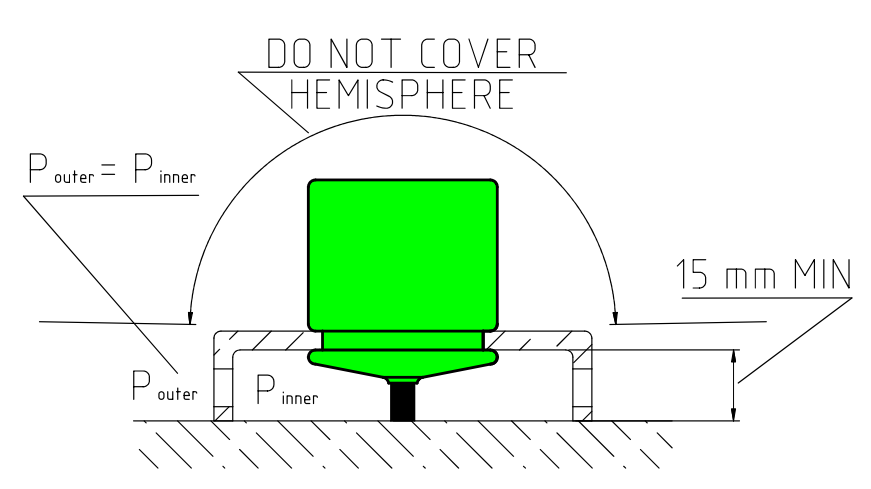
Маяк-ответчик должен крепиться только за специальный паз мягким хомутом таким образом, чтобы исключить любое неравномерное нагружение корпуса маяка, излишнее сдавливание и затенение/экранирование корпуса маяка. Ниже на рисунке представлены базовые требования по монтажу акустической части маяка-ответчика на носителе:
 |
|---|
| Требования по монтажу акустической части маяка-ответчика на носителе |
| Не допускается экранирование пространственной полусферы или частей антенны, расположенной выше крепежного паза; давление в области под креплением должно быть уравновешено с внешним давлением |
Маяк-ответчик не следует располагать вблизи струй движетелей или непосредственно на их пути. Для работы системы требуется прямая видимость (через толщу воды) между пеленгационной антенной и маяком ответчиком, поэтому маяк должен устанавливаться в верхней точки носителя.
Для маяка-ответчика в автономном исполнении: Включение маяка-ответчика в автономном исполнении происходит автоматически, при попадании его в воду. Следует помнить, что сразу после включения, маяк-отчетчик в течение 5 секунд определяет атмосферное давление для более точного измерения глубины. Поэтому рекомендуется сначала погрузить в воду батарейный блок и подождать 5 секунд перед погружением самого маяка-ответчика.
ВНИМАНИЕ! При глубоком разряде батарейной сборки, необходимо как можно быстрее подключить к ней зарядное устройство. В противном случае это может привести к порче батарейной сборки.
Для маяка-ответчика в интегрируемом исполнении: Включение маяка-ответчика в интегрируемом исполнении происходит при подачи питания от внешней системы. После включения маяк-ответчик определяет атмосферное давление в течение 5 секунд для более точного измерения глубины. Если текущее значение внешнего давления более 1200 мБар, то маяк считает, что был включен в погруженном положении, и калибровка атмосферного давления не происходит.
Работоспособность маяка-ответчика легко проверить, включив его: после подачи питания через 2 секунды однократно издается навигационный сигнал.
В исполнении, с использованием стандартного разъема, контакты включения от воды расположены на двух частях разъема: у маяка и у ответной части. Таким образом, при использовании стандартного батарейного блока, включение устройство происходит, когда сомкнутый разъем погружается в воду.
2.1.3. Калибровка углового расхождения
Нулевое направление пеленгационной антенны и нулевое направление компаса (GNSS-компаса или магнитного) могут не совпадать — например, из-за неточной установки антенны в кронштейне. Это приводит к систематической ошибке определения азимута на маяк-ответчик. Для её устранения выполняется процедура угловой калибровки.
Принцип калибровки: во время процедуры антенна и маяк-ответчик должны двигаться друг относительно друга, так чтобы географический азимут на маяк менялся в широком диапазоне углов. Система выполняет серию из N измерений при разных азимутах на маяк, а затем перебирает возможные значения угловой поправки в заданном диапазоне. Для каждой candidate-поправки пересчитываются координаты маяка, и оценивается разброс полученных точек (DRMS — круговое вероятное отклонение). Оптимальной считается поправка, дающая минимальный DRMS — то есть «наиболее кучное» облако точек.
По достижении заданного количества измерений процедура завершается автоматически. Вычисленная поправка применяется и отображается в веб-интерфейсе (панель «Angular Calibration») и в логе приложения.
Возможны два сценария выполнения калибровки:
- Антенна подвижна (на судне): судно движется вокруг неподвижного маяка по окружности
- Антенна стационарна (на пирсе, причале, льду): маяк на подвижном носителе (водолазе, ТНПА) перемещается вокруг антенны
В обоих случаях физический смысл одинаков: необходимо получить измерения при разных географических азимутах на маяк, чтобы алгоритм мог вычислить угловую поправку.
ℹ Почему важно движение вокруг, а не вращение на месте
При вращении антенны вокруг своей оси (без изменения её географического положения относительно маяка) относительный азимут на маяк, измеряемый антенной, меняется, однако географический азимут на маяк остаётся постоянным — маяк неподвижен, антенна не перемещается. Из-за этого угловая ошибка δ одинаково влияет на все измерения, и DRMS не зависит от перебираемой поправки — алгоритм не может определить оптимум.
При движении судна вокруг маяка (или маяка вокруг антенны) географический азимут на маяк меняется от измерения к измерению. Ошибка δ по-разному проецируется на координаты при разных азимутах, и DRMS становится функцией от δ — алгоритм находит поправку, дающую минимум разброса.
Порядок выполнения (антенна на судне):
- Установите маяк-ответчик на удалении 20-50 метров от судна. Убедитесь, что между антенной и маяком есть прямая акустическая видимость.
- Запустите приложение AzimuthConsole убедитесь, что система настроена на работу только с одним маяком, выбранным для калибровки, и установите соединение с системой (команда
OCON). - Убедитесь, что компас (внешний GNSS-компас или магнитный) подключен и передает актуальные данные.
- Начинайте медленное движение судна вокруг маяка по окружности, удерживая скорость и дистанцию как можно более постоянными. Маяк должен оставаться в центре описываемой окружности.
- Выполните команду:
ACAL,start=0,end=360,step=0.5,n=512,addr=X, гдеaddr=X— адрес используемого маяка-ответчика. - После набора заданного количества измерений процедура завершится автоматически. Вычисленная поправка отобразится в веб-интерфейсе (панель «Angular Calibration») и в логе приложения.
- Сохраните настройки командой
SAVEINIT, чтобы поправка применялась при следующих запусках.
Порядок выполнения (антенна на пирсе/льду):
- Установите пеленгационную антенну на пирсе, причале или льду. Зафиксируйте её положение — антенна должна оставаться неподвижной в течение всей процедуры.
- Запустите приложение AzimuthConsole убедитесь, что система настроена на работу только с одним маяком, выбранным для калибровки, и установите соединение с системой (команда
OCON). - Убедитесь, что компас подключен, зафиксирован соосно с антенной и передает актуальные данные. Если компас установлен не соосно, предварительно измерьте и внесите смещение командой
OFS. - Разместите маяк-ответчик на подвижном носителе (водолаз, ТНПА) на удалении не менее 50 метров от антенны. Начальное направление на маяк не имеет значения.
- Начинайте медленное и равномерное перемещение маяка вокруг антенны по окружности. Рекомендации:
- Двигайтесь так, чтобы маяк описывал полную окружность (или хотя бы 180°) вокруг антенны
- Удерживайте дистанцию до антенны как можно более постоянной (допустимы колебания в пределах ±20%)
- Скорость перемещения должна быть низкой и постоянной — особенно при использовании компасов с частотой обновления 1 Гц
- Избегайте резких ускорений и остановок
- Если носитель — водолаз: идите плавным шагом, контролируя дистанцию по показаниям приложения
- Если носитель — ТНПА: задайте медленное движение по окружности с постоянной скоростью
- Выполните команду:
ACAL,start=0,end=360,step=0.5,n=512,addr=X, гдеaddr=X— адрес используемого маяка-ответчика. - После набора заданного количества измерений процедура завершится автоматически. Вычисленная поправка отобразится в веб-интерфейсе (панель «Angular Calibration») и в логе приложения. Сохраните настройки командой
SAVEINIT.
Параметры команды ACAL:
| Параметр | Описание | Рекомендация |
|---|---|---|
start |
Начало диапазона перебора поправок, ° | 0 (если нет предположений о смещении) |
end |
Конец диапазона перебора поправок, ° | 360 |
step |
Шаг перебора поправок, ° | 0.5 (допустимо использовать шаг в диапазоне от 0.1° до 1°) |
n |
Общее количество измерений | 200–500 (больше — точнее, но дольше) |
addr |
Адрес маяка-ответчика (1–16) | Укажите явно, если в зоне видимости несколько маяков |
Общие рекомендации:
- Скорость движения: чем медленнее, тем лучше. При использовании магнитных компасов и GNSS-компасов с частотой обновления 1 Гц критически важно двигаться медленно, чтобы компас успевал выдавать актуальные данные на каждом измерении, это особенно важно в случае с судном.
- Количество измерений: если движение медленное, а частота обновления компаса низкая, увеличьте
n, чтобы измерения охватили всю окружность. Ориентировочно: при частоте 1 Гц и полном круге за 5 минут имеет смысл задатьn=250. - Точность: для более точного результата уменьшите шаг перебора
stepдо 0.1°. Для большинства случаев достаточен шаг 0.5°. - Автоматическое завершение: процедура завершается сама после набора
nизмерений. Результат отображается в веб-интерфейсе (панель «Angular Calibration») и в логе приложения. - Сохранение: после завершения калибровки обязательно выполните
SAVEINIT, иначе поправка не будет применяться при следующих запусках. - Повторная калибровка: рекомендуется выполнять калибровку при каждой переустановке антенны, а также после сильных механических воздействий на кронштейн.
ℹ Примечание
Процедура поддерживается только в AzimuthConsole. Если вы используете устаревшее приложение AzimuthSuite, угловую поправку необходимо измерить вручную и внести в настройках (поле «Угловая поправка»).
2.2. Приложение AzimuthConsole
Подробное руководство пользователя по приложению AzimuthConsole доступно в виде отдельного документа:
| Документ | QR |
|---|---|
| AzimuthConsole: руководство пользователя |
2.3. Приложение AzimuthSuite (устаревшее)
ℹ Информация
Приложение AzimuthSuite более не поддерживается. Рекомендуется использовать AzimuthConsole.
| Документ | QR |
|---|---|
| AzimuthSuite: руководство пользователя |
2.4. Работа с системой
Практически всю работу система выполняет в автоматическом режиме, системе требуется задать:
- адреса маяков, с которыми предполагается работа
- соленость воды, для правильного вычисления глубины и скорости звука
- максимальную дальность, на которой маяки могут находится от пеленгационной антенны
- параметры подключения внешнего источника навигационных данных (GNSS-компас) при необходимости
- параметры подключения внешнего порта-приемника, для эмуляции GNSS для выбранного маяка-ответчика (при наличии внешнего GNSS-компаса).
Далее система автоматически опрашивает маяки-ответчики из указанного диапазона адресов и, в зависимости от применяемой конфигурации, отображет на экране и/или передает по одному из каналов (Serial, UDP) потребителям. В ходе работы пультовое приложение записывает файлы журналов, которые затем могут быть воспроизведены в том же масштабе времени, в котором были записаны.
2.4.1. Взаимодействие с системой
На данном этапе подразумевается, что:
- Подводный разъем антенны проверен и сомкнут (удлиняющий кабель подключен к пеленгационной антенне)
- Антенна должным образом закреплена на штанге, а удлиняющий кабель не имеет свободных провисов
- Надводный разъем удлиняющего кабеля подключен к блоку питания и коммутации, а сам блок выключен
- Блок питания и коммутации подключен к ПК при помощи кабеля USB-B
- Если используется двухканальный блок питания и коммутациия:
- Внешний GNSS-компас подключен к блоку питания и коммутации
- Смещение пеленгационной антенны относительно точки топопривязки (положения GNSS-приемника) измерено и внесено в настройки приложения
- Угол между нулевым направлением компаса и пеленгационной антенны измерен и внесен в настройки приложения
- Второй канал блока питания и коммутации подключен к ПК при помощи кабеля USB-B
- Все маяки-ответчики, с которыми предполагается работа имеют несовпадающие адреса
- Адреса всех маяков-ответчиков, с которыми предполагается работа указаны в настройках приложения
- Если используются маяки-ответчики в автономном исполнении, то разъемы, соединяющие их с батарейными блоками проверены и плотно сомкнуты, батарейные блоки полностью заряжены
- Если используются маяки-ответчики в интегрируемом исполнении, то места кабельных соединений с носителем проверены на герметичность (согласно типу соединения)
- Запущено специализированное ПО (AzimuthConsole или AzimuthSuite)
Маяки рекомендуется включать в надводном положении: при этом в течение пяти секунд после подачи питания происходит калибровка атмосферного давления, которая позволяет выполнять измерение глубины с большей абсолютной точностью.
Так как автономные маяки включаются при погружении батарейного блока в воду, то рекомендуется сначала погружать в воду батарейный блок, а сам маяк-ответчик только по прошествии пяти секунд.
Маяки в интегрируемом исполнении желательно включать перед погружением если это возможно в текущих условиях.
Для начала работы запустите специализированное ПО (AzimuthConsole или AzimuthSuite) и установите соединение с системой. После этого включите блок питания и коммутации Bat&Link Box. Статус подключения отображается в интерфейсе приложения.
Следует помнить, что приложение рассчитано на работу только с одним устройством системы в один момент времени: если к ПК подключена и пеленгационная антенна и один из маяков, то велика вероятность, что при поиске порта будет первым обнаружен маяк. Поиск порта пеленгационной станции в этом случае производится не будет.
После того, как соответствующий порт (или порты) будут обнаружены, система сразу переходит к опросу маяков-ответчиков, адреса которых указаны в настройках. Работа происходит в полностью автоматическом режиме.
Если используется внешний GNSS-приемник или положение и ориентация антенны относительно сторон света задается вручную, система вычисляет абсолютные географические координаты маяков-ответчиков. В зависимости от приложения доступен импорт и передача навигационной информации в различном виде (способы сохранения, каналы и форматы передачи данных зависят от используемого приложения — см. соответствующие руководства).
Система поддерживает трансляцию вычисленных координат маяков-ответчиков в виде стандартных сообщений NMEA (RMC, GGA) через последовательный порт или UDP.
Следует помнить о факторах, снижающих эффективность работы системы, в частности:
- недостаточная глубина пеленгационной антенны
- расположение в непосредственной близости массивных слабопоглощающих объектов инфраструктуры и судов
- отсутствие прямой видимости через толщу воды между пеленгационной антенной и маяками-ответчиками
- высокая зашумленность (как электромагнитные помехи, например в сети питания судна, так и акустические - работающий двигатель судна или носителя, прибой, другие гидроакустические системы, например - гидролокаторы и т.п.)
- малая глубина водоема и малые водоемы в целом создают сложные гидрологические условия для работы гидроакустических навигационных и связных систем
- экранирование пеленгационной антенны и антенн маяков-ответчиков
- воздействие на антенны турбулетных струй от движетелей и/или кильватерного следа
- стратификация плотности воды (термоклин и т.п.)
2.4.2. Ручное задание координат и направления
Если использование внешнего GNSS-компаса затруднено или невозможно, система позволяет задать координаты и ориентацию антенны вручную.
- AzimuthConsole: команда
LHOV,lat=...,lon=...,hdg=... - AzimuthSuite: пункт меню
UTILS > Location override
Подробнее см. в руководствах к соответствующим приложениям.
2.5. По завершении работ
- Отключить питание блока питания и коммутации
- Отключить все разъемы на панели блока питания и коммутации
- Закрыть все разъемы, имеющие транспортировочные заглушки
- При наличии загрязнений или после работы в соленой воде выполнить промывку всех погружаемых частей оборудования в пресной воде
- Демонтировать пеленгационную антенну со штанги
- При постановке на длительное хранение (более недели) или для транспортировки разомнкуть подводный разъем
- Перед помещением в транспортировочную тару вся влага должна быть удалена естественной просушкой без воздействия прямых солнечных лучей
- Для маяков-ответчиков в интегрируемом исполнении, при невозможности снятия их с носителя обязательна промывка в пресной воде и удаление любых загрязнений
3. Обязательства и отказ от ответственности
3.1. Условия замены и бесплатного гарантийного обслуживания
Гарантия производителя распространяется только на заводские дефекты, выявивщиеся при эксплуатации устройства в соответствие с настоящим руководством в течении гарантийного срока (2 года с момента покупки).
Производитель гарантирует бесплатный ремонт или замену неисправного оборудования из комплекта поставки, вышедшего из строя по причине заводского дефекта.
К основаниям для отказа от бесплатного гарантийного обслуживания, бесплатного ремонта и замены относятся:
- любые механические повреждения оборудования из комплекта поставки, в т.ч. нарушение изоляции проводов и кабелей;
- любые повреждения, вызванные воздействием влаги и загрязнений, вследствие неправильной эксплуатации оборудования из комплекта поставки;
- любые электрические повреждения, вызванные использованием некомплектных аксессуаров (зарядных устройства); к некомплектным не отностятся аксессуары, поставленные производителем или его представителем взамен неисправных или утраченых;
- любые следы самостоятельного ремонта и/или вскрытия оборудования из комплекта поставки.
3.2. Ограничение ответственности производителя
ЛЮБАЯ ИЗ ЧАСТЕЙ КОМПЛЕКТА ПОСТАВКИ В ОТДЕЛЬНОСТИ И В СОСТАВЕ СИСТЕМЫ, ИМЕНУЕМЫЕ ДАЛЕЕ “ПОСТАВЛЯЕМОЕ ОБОРУДОВАНИЕ”:
- НЕ РАЗРАБАТЫВАЛОСЬ КАК СРЕДСТВО СПАСЕНИЯ
- НЕ ТЕСТИРОВАЛОСЬ, КАК СРЕДСТВО СПАСЕНИЯ
- НЕ ЯВЛЯЕТСЯ СРЕДСТВОМ СПАСЕНИЯ
- ПРОИЗВОДИТЕЛЬ ЗАЯВЛЯЕТ, ЧТО ПОСТАВЛЯЕМОЕ ОБОРУДОВАНИЕ БЕЗОПАСНО ПРИ ЭКСПЛУАТАЦИИ СОГЛАСНО НАСТОЯЩЕЙ ИНСТРУКЦИИ И НЕ ОТВЕЧАЕТ ЗА ЛЮБЫЕ ПОСЛЕДСТВИЯ ИСПОЛЬЗОВАНИЯ ПОСТАВЛЯЕМОГО ОБОРУДОВАНИЯ
ПРОИЗВОДИТЕЛЬ ГАРАНТИРУЕТ, ЧТО ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ZIMA2 (ДАЛЕЕ - СИСТЕМА):
- ПРЕДНАЗНАЧЕНА ТОЛЬКО ДЛЯ РАБОТЫ С МАЯКАМИ-ОТВЕТЧИКАМИ, РАССЧИТАНЫМИ НА СОВМЕСТНУЮ РАБОТУ С СИСТЕМОЙ
- КОНСТРУКТИВНО НЕ МОЖЕТ БЫТЬ ИСПОЛЬЗОВАНА ДЛЯ СЛЕЖЕНИЯ ЗА ОБЪЕКТАМИ, НЕ ОСНАЩЕННЫМИ МАЯКАМИ-ОТВЕТЧИКАМИ, РАССЧИТАНЫМИ НА СОВМЕСТНУЮ РАБОТУ С СИСТЕМОЙ
- НЕ СОДЕРЖИТ СРЕДСТВ РАДИОСВЯЗИ, ЗАПИСИ И ДЛИТЕЛЬНОГО ХРАНЕНИЯ АУДИОСИГНАЛОВ
ВЫШЕУКАЗАННЫЕ ОГРАНИЧЕНИЯ НЕ МОГУТ БЫТЬ СНЯТЫ НИКАКИМИ МАНИПУЛЯЦИЯМИ С НАСТРОЙКАМИ И/ИЛИ ОРГАНАМИ УПРАВЛЕНИЯ ПРИБОРОВ СИСТЕМЫ И/ИЛИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ, ПРЕДНАЗНАЧЕННОГО ДЛЯ РАБОТЫ С СИСТЕМОЙ