docs.unavlab.com
Main ❯ Navigation & tracking systems ❯ Device specification: RWLT GIB
 |
|
|---|---|
| www.unavlab.com support@unavlab.com |
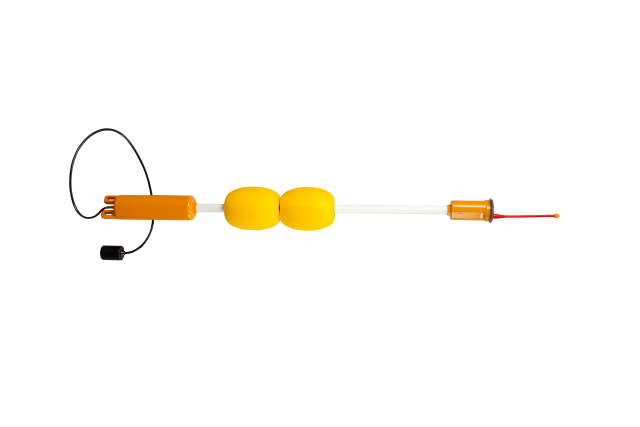
RWLT GIB - Navigation buoy Device specification |
KEY FEATURES
- High performance combined GPS/GLONASS receiver
- Rugged, durable and easy to see body
- Automatic activation in water
- Long battery life up to 24 hours
- Reliable and noise-resistant digital broadband hydroacoustic communication technology
DESCRIPTION
The navigation sonobuoy RWLT GIB of the RWLT system, as part of a set of four such devices, forms a long floating navigation base, with the support of which the positioning of the pinger RWLT Pinger or diving telephone exchange RedPhone. The device is made according to the float-feather scheme, has no air cavities and controls: it turns on automatically when immersed in water, and when the buoy is removed from the water, it automatically turns off.
TECHNICAL SPECIFICATIONS
| PARAMETER | VALUE |
|---|---|
| DIMENSIONS1 (Ф х h) | 130 x 1350 mm |
| WEIGHT (DRY) | 3.7 kg |
| EXCESS BUOYANCY | 1 kg |
| CARRIER FREQUENCY | 20050 Hz |
| BATTERY LIFE2 | 12 hours |
| MAX. RELATIVE SPEED | ± 1.8 m/s |
| WORKING TEMPERATURE RANGE | -10 .. 50 °С |
| MAX. ACOUSTIC COMMUNICATION RANGE3 | 3000 m |
| MAX. DISTANCE TO OTHER BUOYS4,5 | 1500 m |
| MIN. DISTANCE TO OTHER BUOYS5 | 30 m |
| REFERENCE ELLIPSOID | WGS-84 |
| BUILT-IN BATTERY TYPE | LiFePO4 |
| HEIGHT ABOVE WATER (fresh water) | 730 mm |
| DRAFT (fresh water) | 1655 mm |
| TRANSDUCER CABLE LENGTH | 960 mm |
| BUILT-IN RF UNIT TYPE | GFSK, 433 MHz |
| BUILT-IN RF UNIT POWER | 100 mW |
| MAX. RADIO RANGE6 | 1000 m |
1 Without taking into account the hydroacoustic receiving antenna on the cable, with a total length of 1.6 m.
2 With a new, fully charged battery, at an ambient temperature of 20°C.
3 A parameter that determines the maximum range at which a signal can be received, based on electro-acoustic parameters of the transmitter and receiver, spatial decrease in the intensity of sound energy, attenuation in the medium and the acoustic noise level.
4 Buoys should be located on the surface of the water in a convex polygon so that the distance from each buoy to any other does not exceed the specified value.
5 The dive depth of the pinger should not exceed the dimensions of the navigation base.
6 Achieved in the absence of interference, in open areas.