docs.unavlab.com
Главная ❯ Гидроакустические навигационные и трекинговые системы ❯ AzimuthSuite: Руководство пользователя
ℹ Рекомендации для печати/сохранения в PDF
- Нажмите Ctrl+P (macOS: Cmd+P)
- В настройках принтера выберите «Сохранить как PDF» (Microsoft Print to PDF)
- В поле «Страницы» укажите диапазон, исключая первую и последнюю страницу
- Отключите верхние и нижние колонтитулы (заголовки/URL/page numbers)
- В Chrome/Edge: в доп. настройках → «Поля» → Нет | в Firefox: «Поля и колонтитулы» → Нет
- Нажмите Печать и укажите куда сохранить PDF
| www.unavlab.com support@unavlab.com |
AzimuthSuite - Приложение для работы с системой Zima2 USBL Руководство пользователя |
AzimuthSuite
Руководство пользователя
Содержание
1. Приложение AzimuthSuite
ℹ Информация
Приложение AzimuthSuite более не поддерживается. Рекомендуется использовать консольное приложение AzimuthConsole. Данный раздел сохранен для пользователей, которые еще не завершили переход на новое ПО.
1.1. Интерфейс и функции
Пультовое приложение 🐙 AzimuthSiute предназначено для работы под управлением OC Windows начиная с версии 10 и выше с установленным .NET Framework 4.8. Приложение является портируемым (Portable) и не требует установки. Достаточно распаковать архив в удобное для оператора место. Приложение и все используемые им библиотеки разработаны ООО “Лаборатория подводной связи и навигации” и являются Open-Source (с открытым исходным кодом).
Пультовое приложение взаимодействует с устройствами системы согласно откытому NMEA-подобному протоколу по последовательному порту.
1.1.1. Настройки приложения
Приложение использует два типа настроек:
- основные системные настройки, которые хранятся в файле
AzimuthSuite.settingsв директории приложения. Данные настройки читаются приложением при старте и сохраняются по команде пользователя из редактора настроек. - настройки интерфейса, которые хранятся в файле
AzimuthSuite.uisettingsв директории приложения. Данные настройки читаются приложением при старте и сохраняются автоматически при завершении работы приложения.
Внешний вид окна редактора настроек приложения показан на рисунке ниже.
 |
|---|
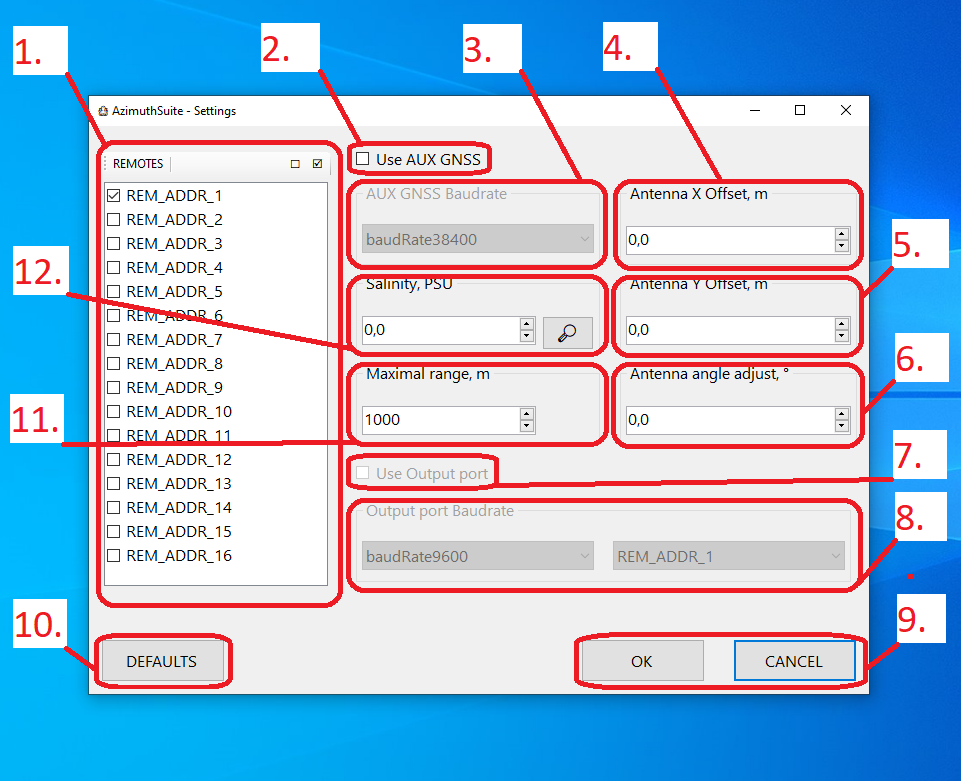
| Вид редактора настроек приложения |
| 1 - Список используемых маяков-ответчиков, 2 - Признак использования внешнего GNSS-компаса, 3 - Скорость порта внешнего GNSS-компаса, 4 - Смещение положения антенны от положения GNSS-компаса в поперечном направлении, 5 - Смещение положения антенны от положения GNSS-компаса в продольном направлении, 6 - Угловая поправка (угол между нулевым направлением GNSS-компаса и нулевым направлением антенны), 7 - Признак использования выходного порта, 8 - Скорость выходного порта, 9 - Кнопки принятия настроек и отмены, 10 - Кнопка сброса настроек к значениям по умолчанию, 11 - Максимальная дистанция до маяков-ответчиков, 12 - Соленость воды |
Система поддерживает последовательную работу с 16 маяками-ответчиками. Оператор может выбрать требуемые адреса маяков в окне 1, установив соответствующие галочки. Всегда устанавливайте галочки только напротив тех адресов, которые будут использованы в текущей работе, иначе система буедт тратить время на опрос отсутствующих в акватории маяков.
Подключение внешнего GNSS-компаса поддерживается по последовательному порту. Для этого установите галочку 2 и укажите скорость порта. Сам порт будет определен системой автоматически. Если компас установлен не соосно с антенной (не на штанге), потребуется указать положение антенны относительно положения GNSS-компаса: положение GNSS-компаса принимается за точку отсчета декартовой системы координат и указываются поперечное 4 и продольное 5 смещения антенны от этой точки (поперечное в направлении левый борт - правый борт, продольное в направлении корма - нос). Если нулевые направления компаса и антенны не совпадают, необходимо указать угловую поправку 6 - угол между нулевыми направлениями компаса и антенны, отсчитывающийся от нулевого направления компаса по часовой стрелке.
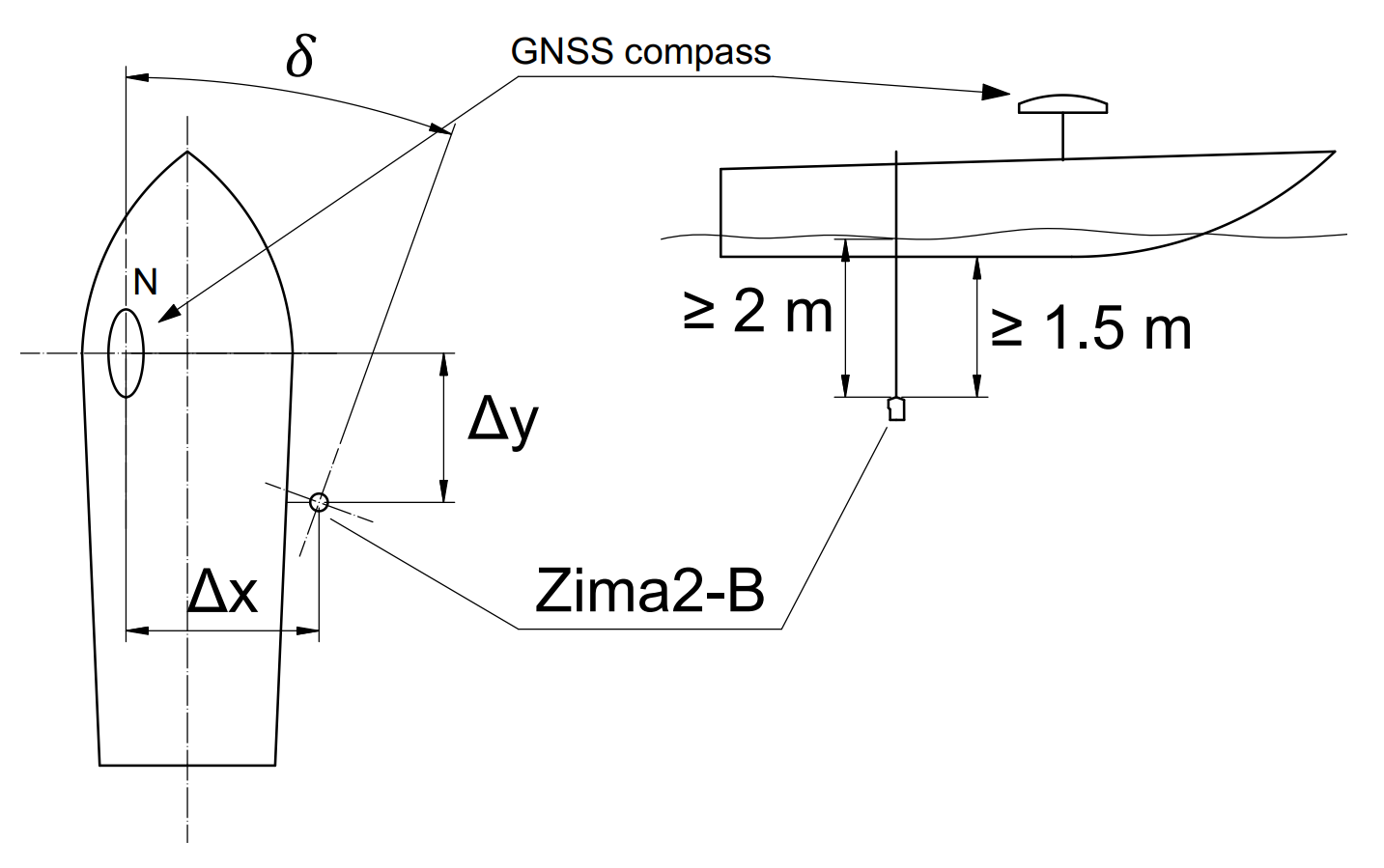
Ниже проиллюстрировано расположение пеленгационной антенны относительно точки привязки:
 |
|---|
| Задание расположения пеленгационной антенны относительно точки привязки и нулевого направления компаса |
| Смещения антенны относительно GNSS-компаса: поперечное ΔX и продольное ΔY; угловое несовпадение нулевых направлений компаса и пеленгационной антенны 𝛿 |
При работе в морской воде следует указать соленость при помощи группы элементов 12: или введя известное значение в поле ввода или воспользовавшись встроенной базой данных соленостей мирового океана, нажав кнопку 🔎 и указав текущие географические координаты.
При работе во внутренних пресных водоемах задайте соленость воды 0.0 PSU. Значение солености необходимо для более точного определения системой глубины и скорости звука.
Макисмальная дистанция до маяка задается в поле 11 и определяет максимальный временной интервал ожидания ответа маяка. Значение задается в диапазоне от 500 до 5999 метров. Следует указывать минимально применимое для текущих условий работы значение, так как это значение напрямую определяет скорость работы системы и время ее простоя при пропуске ответа маяка-ответчика.
Если требуется передача вычисленного географического положения одного из маяков-отвтетчиков в виде стандартных сообщений NMEA (GGA, RMC) в другую систему, включите настройку 7 и укажите имя и скорость порта, в который приложение будет передавать данные. Так как порт используется только для передачи, он не может быть определен автоматически и его имя требуется указать.
При нажатии кнопки ОК приложение сохранит настройки и предложит перезапуститься для того, чтобы новые настройки вступили в силу.
1.1.2. Главное окно приложения
Вид главного окна приложения показан на рисунке ниже.
 |
|---|
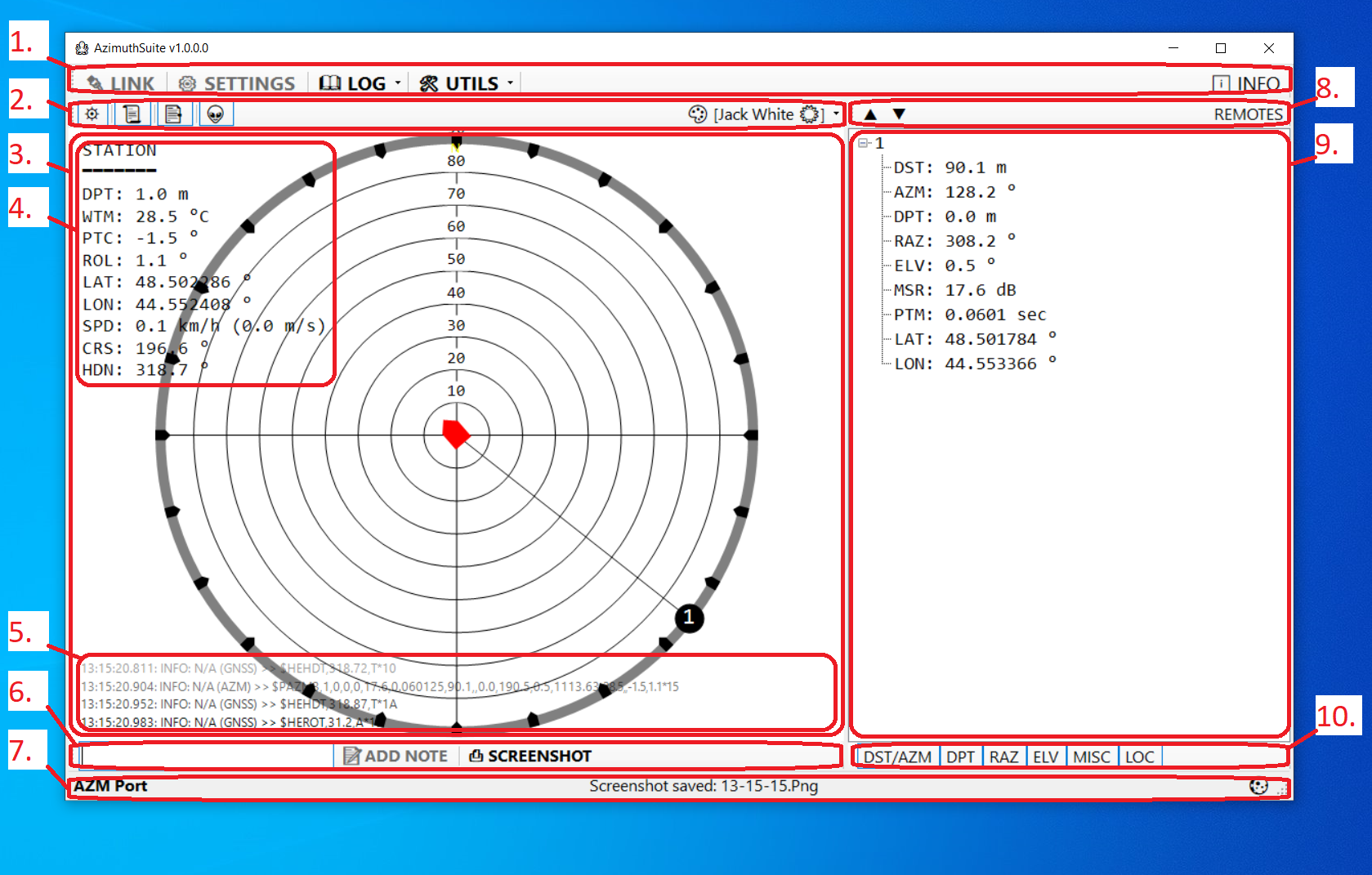
| Вид главного окна приложения |
| 1 - Главная панель инструментов, 2 - Панель инструментов карты, 3 - Поле карты, 4 - Текстовое поле дополнительных параметров, 5 - Текстовое поле журнала, 6 - Дополнительная панель инструментов, 7 - Строка статуса, 8 - Панель инструментов списка маяков-ответчиков, 9 - Список маяков-ответчиков, 10 - Панель переключателей отбражаемых в списке маяков-отвтетчиков параметров |
- 1. Главная панель инструментов располагается в верхней части окна приложения и сподержит следующие элементы:
- Кнопка 🔌 LINK включает и отключает связь со всеми устройствами. При включении соединения приложение бует искать подключенную пеленгационную антенну Zima2-B и внешний GNSS-компас (при включенной настройке). Эта функция также доступна по комбинации клавиш
Ctrl + L. - Кнопка ⚙ SETTINGS служит для вызова редактора настроек. Она становится недоступка при активном соединении и при активном воспроизведении файла журнала
- Меню 📖 LOG - содержит функции для работы с файлами журналов
- Пункт 👀 View current - открыть текущий файл журнала в приложении, ассоциированном с расширением ‘log’ (как правило это Notepad). Эта функция также доступка по комбинации клавиш
Ctrl + H - Пункт ▶ Playback… - выбор файла журнала для воспроизведения в реальном масштабе времени. Данная функция позволяет практически полностью восстановить ход проведенных работ и, к примеру, восстановить трек, который не был сохранен.
- Пункт 🧹 Clear empty entries - очистка директории LOG в папке приложения: будут удалены все файлы журналов, размером менее 2 килобайт и все пустые папки
- Пункт 🗜 Archive all entries… - упаковка всей папки с файлами журналов в Zip-архив.
- Пункт 🗑 Delete all entries - удаление всех файлов журналов приложения. Будьте внимательны! Все файлы будут удалены без возможности восстановления!!!
- Пункт 🧹+🗜+🗑 Do them all… - Удаление всех пустых папок, файлов журналов меньше 2 килобайт, упаковка остальных файлов журналов в Zip-архим и удаление оригиналов в папке LOG приложения.
- Пункт 👀 View current - открыть текущий файл журнала в приложении, ассоциированном с расширением ‘log’ (как правило это Notepad). Эта функция также доступка по комбинации клавиш
- Меню 🛠 UTILS
- Подменю 🗺 TRACKS содержит функции для работы с треками
- Пункт 💾 Export… служит для сохранения треков в формате Goole KML или CSV (Comma-separated values). Эта функция доступна по комбинации клвиш
Ctrl + S - Подменю 🤖 DEVICE
- Пункт View info… активен только при активном соединении и подключенном устройсте (пеленгационной антенне или маяке-ответчике) и служит для вызова окна с информацией об устройстве: типе, версии прошивки и серийном номере
- Пункт Responder settings… активен только при активном соединении и подключенном маяке-ответчике. Служит для вызова редактора настроек маяка-ответчика. Функция также доступна по комбинации клавиш
Ctrl + R
- Пункт 💾 Export… служит для сохранения треков в формате Goole KML или CSV (Comma-separated values). Эта функция доступна по комбинации клвиш
- Подменю 🗺 TRACKS содержит функции для работы с треками
- Группа элементов для управления выходным портом содержит:
- Кнопка 🔄 обновить доступные последовательные порты
- Выпадающий список доступных портов для использования в качестве выходного
- Выпадающий список адресов маяков-ответчикаов, чьи координаты необходимо передавать в выходной порт
- Кнопка 📣 включения/выключения выходного порта
- Кнопка ℹ INFO служит для вызова окна с данными о приложении
- Кнопка 🔌 LINK включает и отключает связь со всеми устройствами. При включении соединения приложение бует искать подключенную пеленгационную антенну Zima2-B и внешний GNSS-компас (при включенной настройке). Эта функция также доступна по комбинации клавиш
- 2. Панель инструментов карты находится над полем карты (3) и содержит следующие элементы:
- Кнопка ⛯ - включение/отключение отображения лимба. Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка 📜 - включение/отключение отображения текстового поля журнала (5). Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка 📑 - включение/отключение отображения поля комментариев (NOTES). Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка 👽 - - включение/отключение отображения поля дополнительных параметров (4). Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Меню 🎨 содержит список доступных цветовых схем. Измненение цветовой схемы автомтически сохраняется
- 3. Поле карты служит для отображения относительного положения антенны и маяков-ответчтиков в масштабе, а также различной дополнительной информации:
- Текстовое поле дополнительных параметров (4) располагается в левой верхней части панели карты. Отображение этого поля может переключаться при помощи кнопки 👽 на панели инструментов карты (2). Каждый параметр отображается в отдельной строке, начинающейся с трехбуквенного идентификатора параметра и двоеточия, затем отображается значение параметра и единицы измерения. Время в формате (MM:SS), отображаемое рядом с параметром, показывает как давно значение параметра было обновлено. Ниже в таблице представлен список всех возможных идентификаторов и их описание:
| Идентификатор | Описание | Единицы измерения | Диапазон |
|---|---|---|---|
| DPT | Глубина погружения антенн | м | 0 .. 300 |
| WTM | Занчение температуры воды | °C | -10 .. +40 |
| PTC | Дифферент антенны | ° | -90 .. +90 |
| ROL | Крен антенны | ° | -90 .. +90 |
| LAT | Широта по данным внешнего GNSS | ° | -90 .. 90 |
| LON | Долгота по данным внешнего GNSS | ° | -180 .. 180 |
| SPD | Скорость по данным внешнего GNSS | km/h (m/s) | >= 0 |
| CRS | Курс по данным внешнего GNSS | ° | 0 .. 360 |
| HDN | Азимут по данным внешнего GNSS | ° | 0 .. 360 |
-
5. Поле журнала располагается в нижней части панели карты и отображает последние 4 строки журнала приложения. Видимость этого поля переключается кнопкой 📜 на панели инструментов карты (2).
- 6. Дополнительная панель инструментов располагается под панелью карты и содержит следующие элементы:
- Поле ввода и кнопка 📝 ADD NOTE служат для ввода комментариев в файл журнала. Вы можете просто набирать текстовый комментарий и нажимать клавишу Enter независимо от того, на каком элементе управления находится фокус. Комментарии сохраняются с временной меткой, и в дальнейшем, при проигрывании файла журнала комментарии будут отображаться в соответствующий момент времени. Данная функция позволяет быстро сохранить какие-либо текстовые заметки о ходе работы
- Кнопка 📸 SCREENSHOT служит для сохранения снимка главного окна приложения в графический файл. Снимки экрана сохраняются в директории SCREENSHOTS в папке приложения. Имя последнего сохраненного скриншота отображается в строке статуса (7). Данная функция также доступна по комбинации клавиш
Ctrl + P
-
7. Строка статуса В строке отображаются статусы портов пеленгационной антенны и внешнего источника навигационных данных (внешнего GNSS-компаса), имя последнего сохраненного скриншота или Zip-архива, в который были упакованы файлы журнала
- 8. Панель инструментов списка маяков-ответчиков REMOTES расположена над списком маяков-ответчиков (9) в левой части главного окна приложения. Панель содержит следующие элементы:
- Кнопка ▼ - свернуть все элементы списка (
Ctrl + Down) - Кнопка ▲ - развернуть все элементы списка (
Ctrl + Up)
- Кнопка ▼ - свернуть все элементы списка (
- 9. Список маяков-ответчиков REMOTES расположен в левой части главного окна приложения. Список имеет древовидную структуру, узлы верхнего уровня именуются по адресам маяков-ответчиков. Дочерние узлы содержат известную системе информацию о данном маяке-ответчике. Каждый отдельный параметр представлен строчкой, которая начинается с идентификатора параметра, через двоеточие следует значение параметра. Если значение данного параметра было обновлено более 3-х секунд назад, то в скобках указывается время, прошедшее с момента обновления параметра в формате (MM:SS). Ниже представлен список возможных параметров:
| Идентификатор | Описание | Единицы измерения | Диапазон |
|---|---|---|---|
| DST | Дистанция до маяка-отвечика от положения по данным внешнего GNSS (проекция наклонной дальности на водную поверхность) | м | 0 .. 5999 |
| AZM | Направление (курс) на маяк-ответчик | ° | 0 .. 360 |
| DPT | Глубина маяка-отвечика | м | 0 .. 300 |
| RAZ | Обратное направление (курс) от маяка-ответчика на пеленгационную антенну | ° | 0 .. 360 |
| ELV | Вертикальный угол на маяк-ответчик | ° | 0 .. 90 |
| MSR | Параметр, характеризующий качество связи | dB | 0 .. 90 |
| PTM | Время распространения сигнала | сек | 0 .. 4 |
| LAT | Вычисленная широта | ° | -90 .. 90 |
| LON | Вычисленная долгота | ° | -180 .. 180 |
Наиболее важными параметрами здесь являются AZM, DST и RAZ: по азимуту и дистанции оператор всегда может понять где относительно него располагается тот или иной маяк-ответчик, а параметр RAZ позволит осуществить привод носителя. Отображение различных параметров переключается кнопками на панели (10).
- 10. Панель переключателей отбражаемых в списке маяков-отвтетчиков параметров переключает видимость параметров в списке:
- Кнопка DST/AZM включает/выключает отображение дистанции и направления на маяки-ответчики. Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка DPT включает/выключает отображение глубины маяков-ответчиков. Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка RAZ включает/выключает отображение направления от маяков-ответчиков. Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка ELV включает/выключает отображение вертикального направления на маяки-ответчики. Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка MISC включает/выключает отображение времени распространения сигнала PTM и параметра качества связи MSR. Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
- Кнопка LOC - включает/выключает отображение местоположения маяков-ответчиков (широты и долготы). Изменение состояния этой кнопки автоматически сохраняется и воспроизводится при проигрывании файлов журнала
1.1.3. Настройка маяков-ответчиков
Если работа проводится с более чем одним маяком-ответчиком, совершенно необходимо, чтобы их адреса были различны. Для настройки адреса маяка-ответчика его требуется подключить к ПК. Для автономного исполнения маяка-ответчика его необходимо отсоединить от батарейного блока и подключить через комплектный USB-переходник.
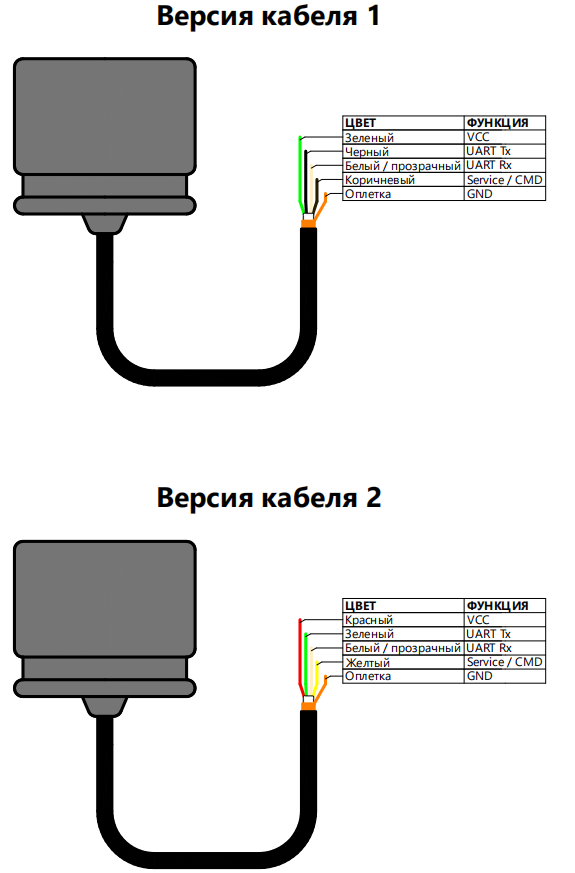
Для интегрируемого исполнения, необходимо воспользоваться преобразователем USB-UART согласно распиновке:
ВНИМАНИЕ! Напряжение линий данных маяка-ответичка 0 .. 3.3 V! Используйте для подключения маяков к ПК только преобразователи с подходящими уровнями.
 |
|---|
| Назначение жил кабеля маяков-ответчиков Zima-R и Zima2-R |
После подключения маяка-ответчика к ПК, запустите приложение AzimuthSuite и установите соединение, нажав кнопку 🔌 LINK (или комбинацию клавиш Ctrl + L).
Приложение выполнит поиск порта, ход и результат поиска отображается в строке статуса.
После того, как соединение будет успешно установлено, станет доступен пункт меню 🛠 UTILS ⯈ 🤖 DEVICE ⯈ Responder settings….
В открывшемся окне диалога настройки адреса доступны функции:
- определения текущего адреса маяка (кнопка 📤 QUERY)
- задания указанного адреса маяка (кнопка 📥 APPLY)
Запись новых настроек в энергонезависимую память маяка-ответчика занимает от 1.5 до 3 секунд.